 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTinySense: A Lighter Weight and More Power-efficient Avionics System for Flying Insect-scale Robots
Jan 06, 2025In this paper, we investigate the prospects and challenges of sensor suites in achieving autonomous control for flying insect robots (FIRs) weighing less than a gram. FIRs, owing to their minuscule weight and size, offer unparalleled advantages in terms of material cost and scalability. However, their size introduces considerable control challenges, notably high-speed dynamics, restricted power, and limited payload capacity. While there have been notable advancements in developing lightweight sensors, often drawing inspiration from biological systems, no sub-gram aircraft has been able to attain sustained hover without relying on feedback from external sensing such as a motion capture system. The lightest vehicle capable of sustained hover -- the first level of "sensor autonomy" -- is the much larger 28 g Crazyflie. Previous work reported a reduction in size of that vehicle's avionics suite to 187 mg and 21 mW. Here, we report a further reduction in mass and power to only 78.4 mg and 15 mW. We replaced the laser rangefinder with a lighter and more efficient pressure sensor, and built a smaller optic flow sensor around a global-shutter imaging chip. A Kalman Filter (KF) fuses these measurements to estimate the state variables that are needed to control hover: pitch angle, translational velocity, and altitude. Our system achieved performance comparable to that of the Crazyflie's estimator while in flight, with root mean squared errors of 1.573 degrees, 0.186 m/s, and 0.139 m, respectively, relative to motion capture.
Solar-powered shape-changing origami microfliers
Sep 13, 2023Using wind to disperse microfliers that fall like seeds and leaves can help automate large-scale sensor deployments. Here, we present battery-free microfliers that can change shape in mid-air to vary their dispersal distance. We design origami microfliers using bi-stable leaf-out structures and uncover an important property: a simple change in the shape of these origami structures causes two dramatically different falling behaviors. When unfolded and flat, the microfliers exhibit a tumbling behavior that increases lateral displacement in the wind. When folded inward, their orientation is stabilized, resulting in a downward descent that is less influenced by wind. To electronically transition between these two shapes, we designed a low-power electromagnetic actuator that produces peak forces of up to 200 millinewtons within 25 milliseconds while powered by solar cells. We fabricated a circuit directly on the folded origami structure that includes a programmable microcontroller, Bluetooth radio, solar power harvesting circuit, a pressure sensor to estimate altitude and a temperature sensor. Outdoor evaluations show that our 414 milligram origami microfliers are able to electronically change their shape mid-air, travel up to 98 meters in a light breeze, and wirelessly transmit data via Bluetooth up to 60 meters away, using only power collected from the sun.
RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion
Jan 08, 2020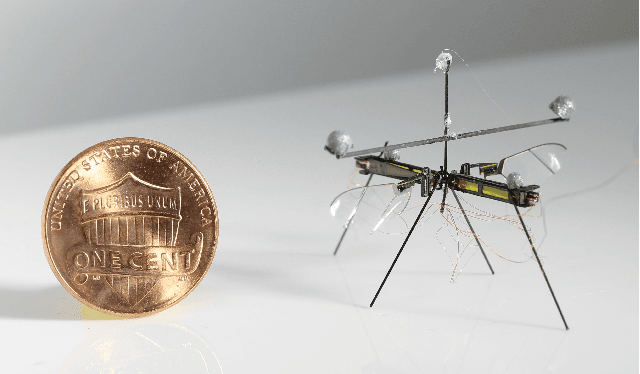
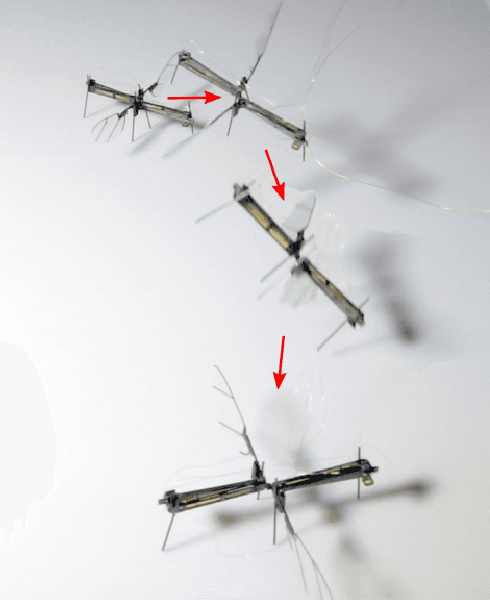
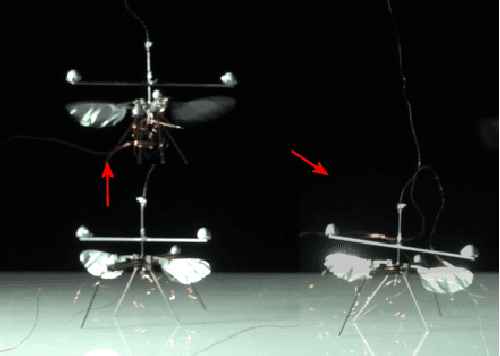
Aerial robots the size of a honeybee (~100 mg) have advantages over larger robots because of their small size, low mass and low materials cost. Previous iterations have demonstrated controlled flight but were difficult to fabricate because they consisted of many separate parts assembled together. They also were unable to perform locomotion modes besides flight. This paper presents a new design of a 74 mg flapping-wing robot that dramatically reduces the number of parts and simplifies fabrication. It also has a lower center of mass, which allows the robot to additionally land without the need for long legs, even in case of unstable flight. Furthermore, we show that the new design allows for wing-driven ground and air-water interfacial locomotion, improving the versatility of the robot. Forward thrust is generated by increasing the speed of downstroke relative to the upstroke of the flapping wings. This also allows for steering. The ability to land and subsequently move along the ground allows the robot to negotiate extremely confined spaces, underneath obstacles, and to precise locations. We describe the new design in detail and present results demonstrating these capabilities, as well as hovering flight and controlled landing.