 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolar-powered shape-changing origami microfliers
Sep 13, 2023Using wind to disperse microfliers that fall like seeds and leaves can help automate large-scale sensor deployments. Here, we present battery-free microfliers that can change shape in mid-air to vary their dispersal distance. We design origami microfliers using bi-stable leaf-out structures and uncover an important property: a simple change in the shape of these origami structures causes two dramatically different falling behaviors. When unfolded and flat, the microfliers exhibit a tumbling behavior that increases lateral displacement in the wind. When folded inward, their orientation is stabilized, resulting in a downward descent that is less influenced by wind. To electronically transition between these two shapes, we designed a low-power electromagnetic actuator that produces peak forces of up to 200 millinewtons within 25 milliseconds while powered by solar cells. We fabricated a circuit directly on the folded origami structure that includes a programmable microcontroller, Bluetooth radio, solar power harvesting circuit, a pressure sensor to estimate altitude and a temperature sensor. Outdoor evaluations show that our 414 milligram origami microfliers are able to electronically change their shape mid-air, travel up to 98 meters in a light breeze, and wirelessly transmit data via Bluetooth up to 60 meters away, using only power collected from the sun.
Leaf-like Origami with Bistability for Self-Adaptive Grasping Motions
Nov 03, 2020
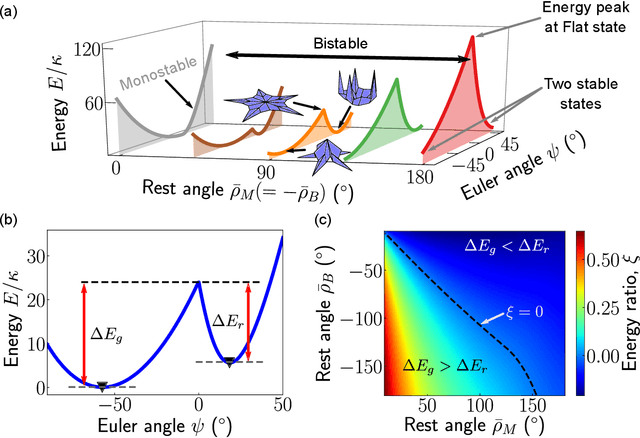
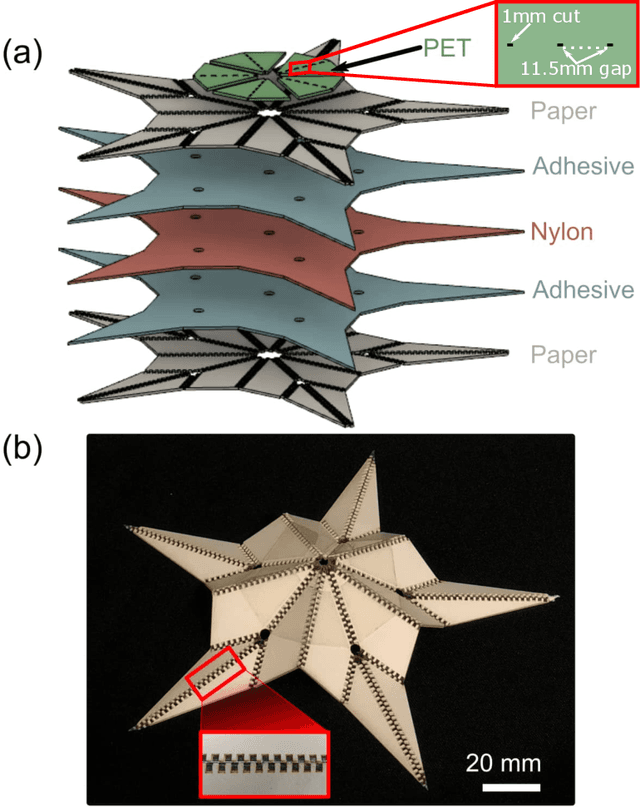
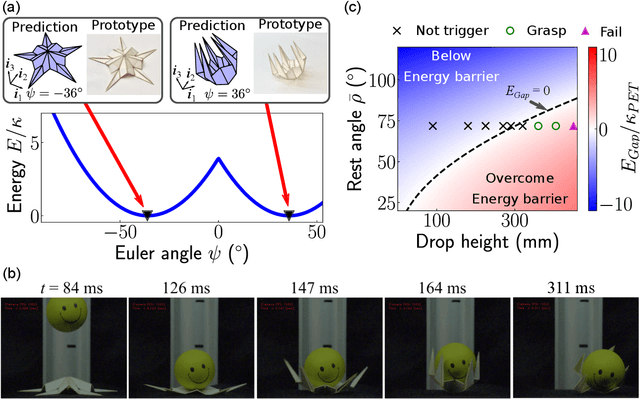
The leaf-like origami structure was inspired by geometric patterns found in nature, exhibiting unique transitions between open and closed shapes. With a bistable energy landscape, leaf-like origami is able to replicate the autonomous grasping of objects observed in biological systems like the Venus flytrap. We show uniform grasping motions of the leaf-like origami, as well as various non-uniform grasping motions which arise from its multi-transformable nature. Grasping motions can be triggered with high tunability due to the structure's bistable energy landscape. We demonstrate the self-adaptive grasping motion by dropping a target object onto our paper prototype, which does not require an external power source to retain the capture of the object. We also explore the non-uniform grasping motions of the leaf-like structure by selectively controlling the creases, which reveals various unique grasping configurations that can be exploited for versatile, autonomous, and self-adaptive robotic operations.