 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Framework for Kinematic Simulation of Rigid Foldable Structures
Jan 15, 2026Origami-inspired structures with rigid panels now span thick, kirigami, and multi-sheet realizations, making unified kinematic analysis essential. Yet a general method that consolidates their loop constraints has been lacking. We present an automated approach that generates the Pfaffian constraint matrix for arbitrary rigid foldable structures (RFS). From a minimally extended data schema, the tool constructs the facet-hinge graph, extracts a minimum cycle basis that captures all constraints, and assembles a velocity-level constraint matrix via screw theory that encodes coupled rotation and translation loop closure. The framework computes and visualizes deploy and fold motions across diverse RFS while eliminating tedious and error-prone constraint calculations.
Leaf-like Origami with Bistability for Self-Adaptive Grasping Motions
Nov 03, 2020
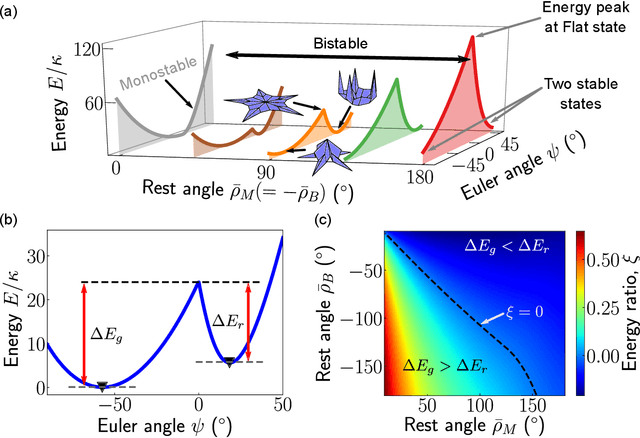
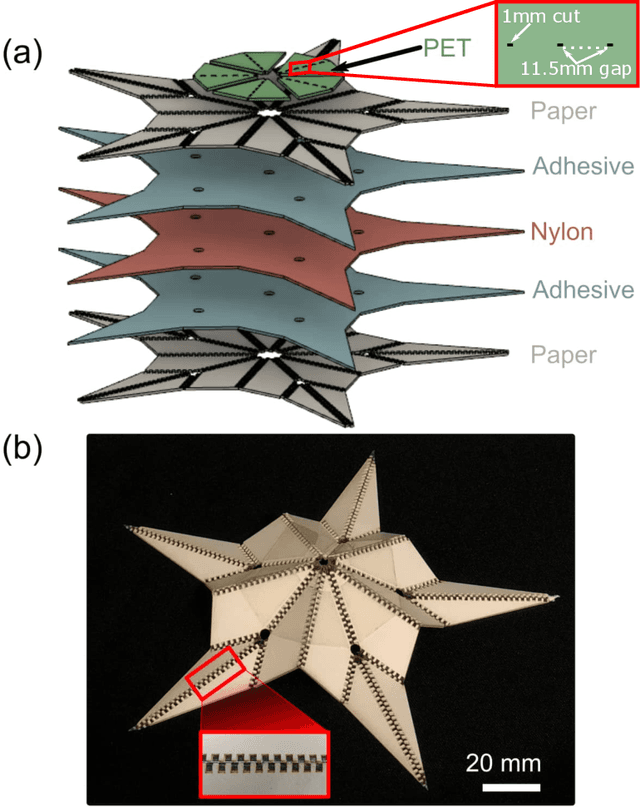
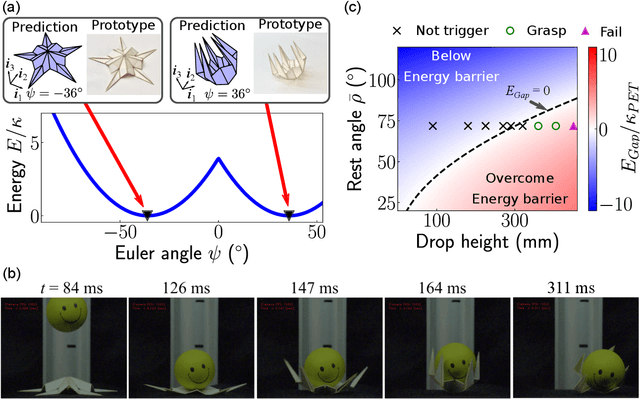
The leaf-like origami structure was inspired by geometric patterns found in nature, exhibiting unique transitions between open and closed shapes. With a bistable energy landscape, leaf-like origami is able to replicate the autonomous grasping of objects observed in biological systems like the Venus flytrap. We show uniform grasping motions of the leaf-like origami, as well as various non-uniform grasping motions which arise from its multi-transformable nature. Grasping motions can be triggered with high tunability due to the structure's bistable energy landscape. We demonstrate the self-adaptive grasping motion by dropping a target object onto our paper prototype, which does not require an external power source to retain the capture of the object. We also explore the non-uniform grasping motions of the leaf-like structure by selectively controlling the creases, which reveals various unique grasping configurations that can be exploited for versatile, autonomous, and self-adaptive robotic operations.