 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTinySense: A Lighter Weight and More Power-efficient Avionics System for Flying Insect-scale Robots
Jan 06, 2025In this paper, we investigate the prospects and challenges of sensor suites in achieving autonomous control for flying insect robots (FIRs) weighing less than a gram. FIRs, owing to their minuscule weight and size, offer unparalleled advantages in terms of material cost and scalability. However, their size introduces considerable control challenges, notably high-speed dynamics, restricted power, and limited payload capacity. While there have been notable advancements in developing lightweight sensors, often drawing inspiration from biological systems, no sub-gram aircraft has been able to attain sustained hover without relying on feedback from external sensing such as a motion capture system. The lightest vehicle capable of sustained hover -- the first level of "sensor autonomy" -- is the much larger 28 g Crazyflie. Previous work reported a reduction in size of that vehicle's avionics suite to 187 mg and 21 mW. Here, we report a further reduction in mass and power to only 78.4 mg and 15 mW. We replaced the laser rangefinder with a lighter and more efficient pressure sensor, and built a smaller optic flow sensor around a global-shutter imaging chip. A Kalman Filter (KF) fuses these measurements to estimate the state variables that are needed to control hover: pitch angle, translational velocity, and altitude. Our system achieved performance comparable to that of the Crazyflie's estimator while in flight, with root mean squared errors of 1.573 degrees, 0.186 m/s, and 0.139 m, respectively, relative to motion capture.
A flexured-gimbal 3-axis force-torque sensor reveals minimal cross-axis coupling in an insect-sized flapping-wing robot
Jun 28, 2024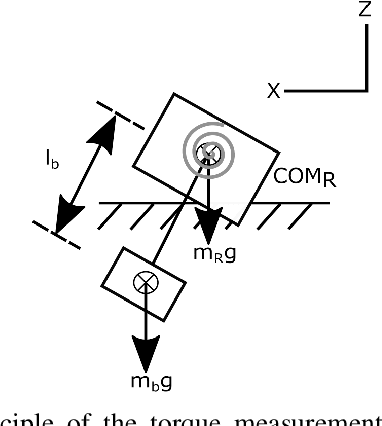
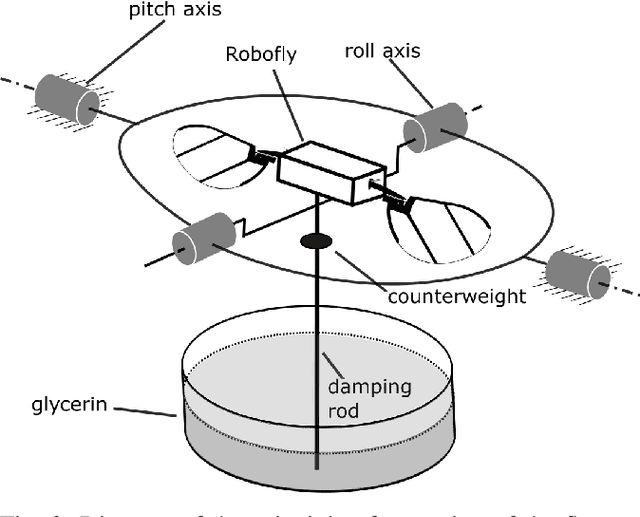
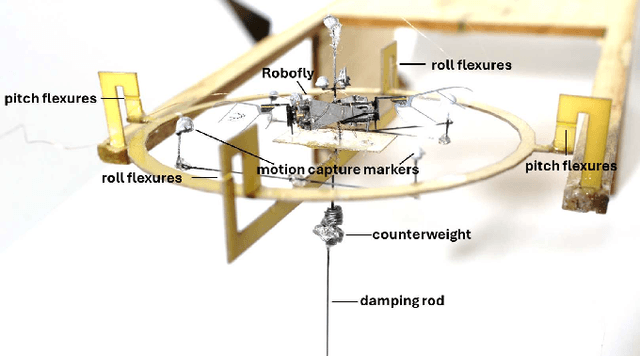
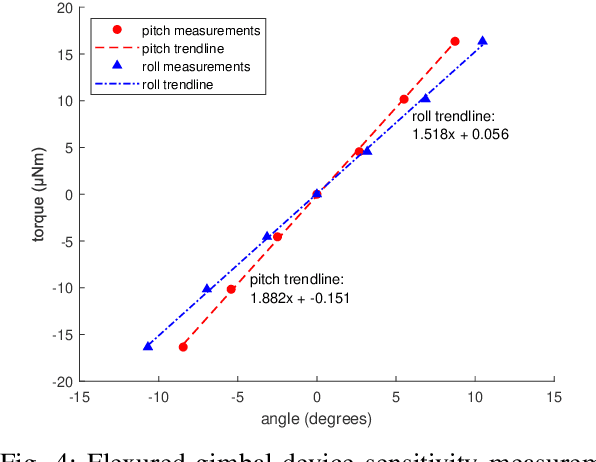
The mechanical complexity of flapping wings, their unsteady aerodynamic flow, and challenge of making measurements at the scale of a sub-gram flapping-wing flying insect robot (FIR) make its behavior hard to predict. Knowing the precise mapping from voltage input to torque output, however, can be used to improve their mechanical and flight controller design. To address this challenge, we created a sensitive force-torque sensor based on a flexured gimbal that only requires a standard motion capture system or accelerometer for readout. Our device precisely and accurately measures pitch and roll torques simultaneously, as well as thrust, on a tethered flapping-wing FIR in response to changing voltage input signals. With it, we were able to measure cross-axis coupling of both torque and thrust input commands on a 180 mg FIR, the UW Robofly. We validated these measurements using free-flight experiments. Our results showed that roll and pitch have maximum cross-axis coupling errors of 8.58% and 17.24%, respectively, relative to the range of torque that is possible. Similarly, varying the pitch and roll commands resulted in up to a 5.78% deviation from the commanded thrust, across the entire commanded torque range. Our system, the first to measure two torque axes simultaneously, shows that torque commands have a negligible cross-axis coupling on both torque and thrust.