 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA flexured-gimbal 3-axis force-torque sensor reveals minimal cross-axis coupling in an insect-sized flapping-wing robot
Jun 28, 2024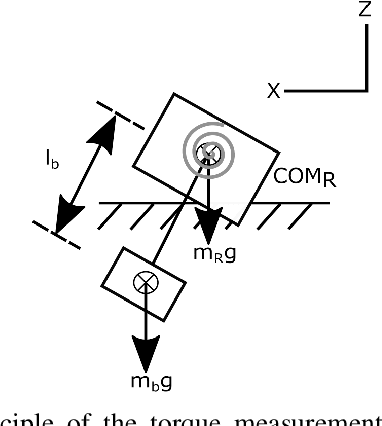
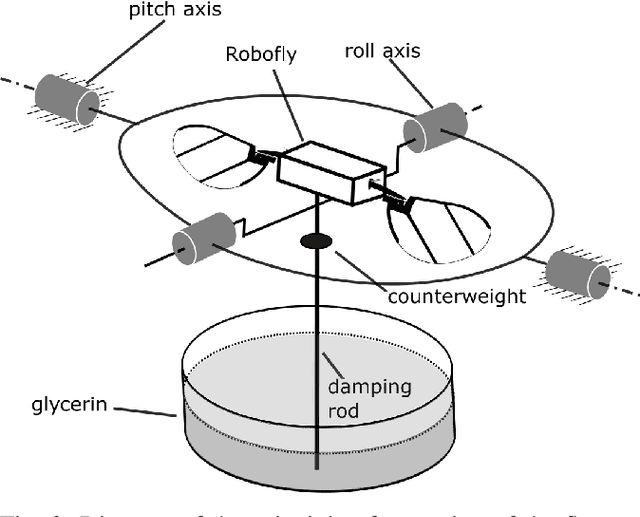
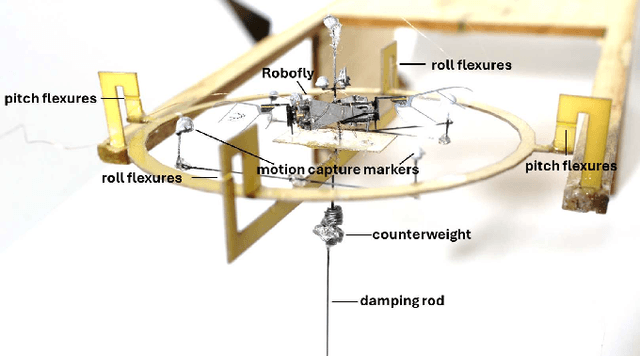
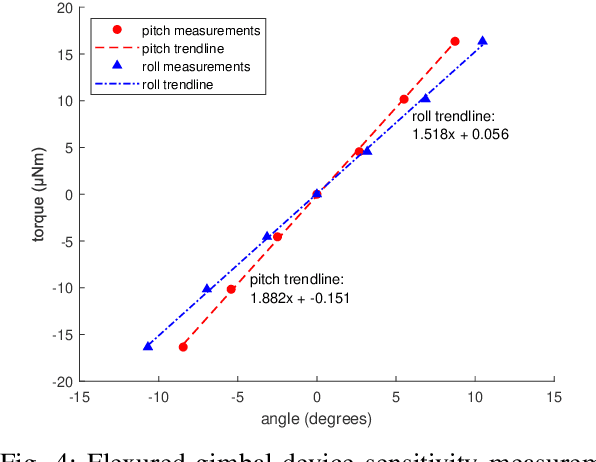
The mechanical complexity of flapping wings, their unsteady aerodynamic flow, and challenge of making measurements at the scale of a sub-gram flapping-wing flying insect robot (FIR) make its behavior hard to predict. Knowing the precise mapping from voltage input to torque output, however, can be used to improve their mechanical and flight controller design. To address this challenge, we created a sensitive force-torque sensor based on a flexured gimbal that only requires a standard motion capture system or accelerometer for readout. Our device precisely and accurately measures pitch and roll torques simultaneously, as well as thrust, on a tethered flapping-wing FIR in response to changing voltage input signals. With it, we were able to measure cross-axis coupling of both torque and thrust input commands on a 180 mg FIR, the UW Robofly. We validated these measurements using free-flight experiments. Our results showed that roll and pitch have maximum cross-axis coupling errors of 8.58% and 17.24%, respectively, relative to the range of torque that is possible. Similarly, varying the pitch and roll commands resulted in up to a 5.78% deviation from the commanded thrust, across the entire commanded torque range. Our system, the first to measure two torque axes simultaneously, shows that torque commands have a negligible cross-axis coupling on both torque and thrust.
Modeling and LQR Control of Insect Sized Flapping Wing Robot
Jun 28, 2024



Flying insects can perform rapid, sophisticated maneuvers like backflips, sharp banked turns, and in-flight collision recovery. To emulate these in aerial robots weighing less than a gram, known as flying insect robots (FIRs), a fast and responsive control system is essential. To date, these have largely been, at their core, elaborations of proportional-integral-derivative (PID)-type feedback control. Without exception, their gains have been painstakingly tuned by hand. Aggressive maneuvers have further required task-specific tuning. Optimal control has the potential to mitigate these issues, but has to date only been demonstrated using approxiate models and receding horizon controllers (RHC) that are too computationally demanding to be carried out onboard the robot. Here we used a more accurate stroke-averaged model of forces and torques to implement the first demonstration of optimal control on an FIR that is computationally efficient enough to be performed by a microprocessor carried onboard. We took force and torque measurements from a 150 mg FIR, the UW Robofly, using a custom-built sensitive force-torque sensor, and validated them using motion capture data in free flight. We demonstrated stable hovering (RMS error of about 4 cm) and trajectory tracking maneuvers at translational velocities up to 25 cm/s using an optimal linear quadratic regulator (LQR). These results were enabled by a more accurate model and lay the foundation for future work that uses our improved model and optimal controller in conjunction with recent advances in low-power receding horizon control to perform accurate aggressive maneuvers without iterative, task-specific tuning.
Probabilistic Localization of Insect-Scale Drones on Floating-Gate Inverter Arrays
Feb 16, 2021



We propose a novel compute-in-memory (CIM)-based ultra-low-power framework for probabilistic localization of insect-scale drones. The conventional probabilistic localization approaches rely on the three-dimensional (3D) Gaussian Mixture Model (GMM)-based representation of a 3D map. A GMM model with hundreds of mixture functions is typically needed to adequately learn and represent the intricacies of the map. Meanwhile, localization using complex GMM map models is computationally intensive. Since insect-scale drones operate under extremely limited area/power budget, continuous localization using GMM models entails much higher operating energy -- thereby, limiting flying duration and/or size of the drone due to a larger battery. Addressing the computational challenges of localization in an insect-scale drone using a CIM approach, we propose a novel framework of 3D map representation using a harmonic mean of "Gaussian-like" mixture (HMGM) model. The likelihood function useful for drone localization can be efficiently implemented by connecting many multi-input inverters in parallel, each programmed with the parameters of the 3D map model represented as HMGM. When the depth measurements are projected to the input of the implementation, the summed current of the inverters emulates the likelihood of the measurement. We have characterized our approach on an RGB-D indoor localization dataset. The average localization error in our approach is $\sim$0.1125 m which is only slightly degraded than software-based evaluation ($\sim$0.08 m). Meanwhile, our localization framework is ultra-low-power, consuming as little as $\sim$17 $\mu$W power while processing a depth frame in 1.33 ms over hundred pose hypotheses in the particle-filtering (PF) algorithm used to localize the drone.