 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolynomial Surrogate Training for Differentiable Ternary Logic Gate Networks
Feb 27, 2026Differentiable logic gate networks (DLGNs) learn compact, interpretable Boolean circuits via gradient-based training, but all existing variants are restricted to the 16 two-input binary gates. Extending DLGNs to Ternary Kleene $K_3$ logic and training DTLGNs where the UNKNOWN state enables principled abstention under uncertainty is desirable. However, the support set of potential gates per neuron explodes to $19{,}683$, making the established softmax-over-gates training approach intractable. We introduce Polynomial Surrogate Training (PST), which represents each ternary neuron as a degree-$(2,2)$ polynomial with 9 learnable coefficients (a $2{,}187\times$ parameter reduction) and prove that the gap between the trained network and its discretized logic circuit is bounded by a data-independent commitment loss that vanishes at convergence. Scaling experiments from 48K to 512K neurons on CIFAR-10 demonstrate that this hardening gap contracts with overparameterization. Ternary networks train $2$-$3\times$ faster than binary DLGNs and discover true ternary gates that are functionally diverse. On synthetic and tabular tasks we find that the UNKNOWN output acts as a Bayes-optimal uncertainty proxy, enabling selective prediction in which ternary circuits surpass binary accuracy once low-confidence predictions are filtered. More broadly, PST establishes a general polynomial-surrogate methodology whose parameterization cost grows only quadratically with logic valence, opening the door to many-valued differentiable logic.
Robust Stochastic Shortest-Path Planning via Risk-Sensitive Incremental Sampling
Aug 16, 2024



With the pervasiveness of Stochastic Shortest-Path (SSP) problems in high-risk industries, such as last-mile autonomous delivery and supply chain management, robust planning algorithms are crucial for ensuring successful task completion while mitigating hazardous outcomes. Mainstream chance-constrained incremental sampling techniques for solving SSP problems tend to be overly conservative and typically do not consider the likelihood of undesirable tail events. We propose an alternative risk-aware approach inspired by the asymptotically-optimal Rapidly-Exploring Random Trees (RRT*) planning algorithm, which selects nodes along path segments with minimal Conditional Value-at-Risk (CVaR). Our motivation rests on the step-wise coherence of the CVaR risk measure and the optimal substructure of the SSP problem. Thus, optimizing with respect to the CVaR at each sampling iteration necessarily leads to an optimal path in the limit of the sample size. We validate our approach via numerical path planning experiments in a two-dimensional grid world with obstacles and stochastic path-segment lengths. Our simulation results show that incorporating risk into the tree growth process yields paths with lengths that are significantly less sensitive to variations in the noise parameter, or equivalently, paths that are more robust to environmental uncertainty. Algorithmic analyses reveal similar query time and memory space complexity to the baseline RRT* procedure, with only a marginal increase in processing time. This increase is offset by significantly lower noise sensitivity and reduced planner failure rates.
GAMEOPT+: Improving Fuel Efficiency in Unregulated Heterogeneous Traffic Intersections via Optimal Multi-agent Cooperative Control
May 26, 2024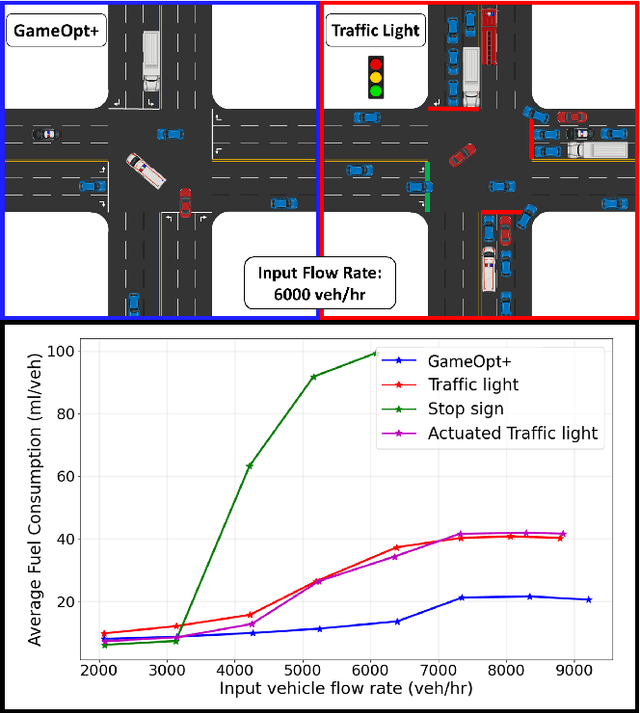
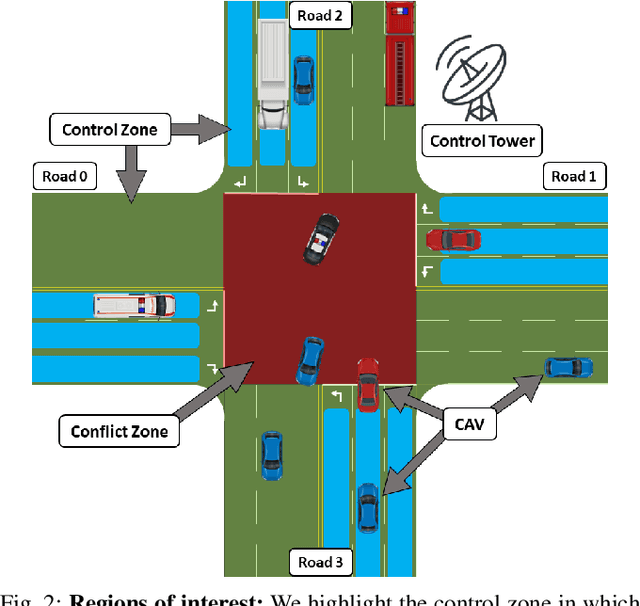
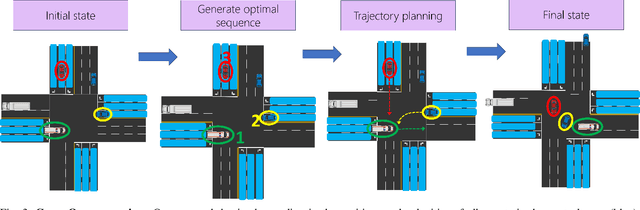
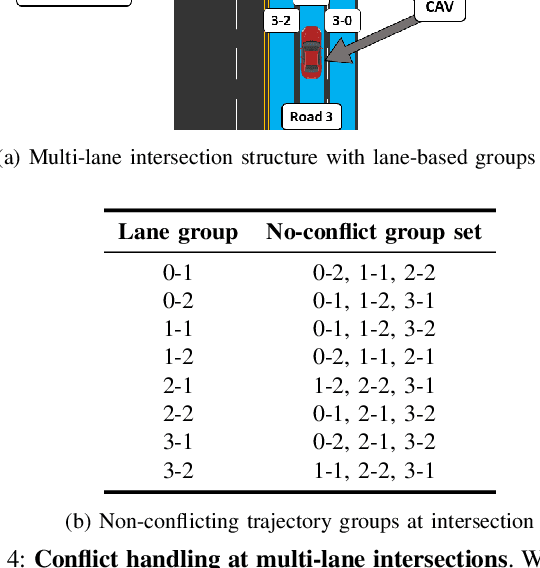
Better fuel efficiency leads to better financial security as well as a cleaner environment. We propose a novel approach for improving fuel efficiency in unstructured and unregulated traffic environments. Existing intelligent transportation solutions for improving fuel efficiency, however, apply only to traffic intersections with sparse traffic or traffic where drivers obey the regulations, or both. We propose GameOpt+, a novel hybrid approach for cooperative intersection control in dynamic, multi-lane, unsignalized intersections. GameOpt+ is a hybrid solution that combines an auction mechanism and an optimization-based trajectory planner. It generates a priority entrance sequence for each agent and computes velocity controls in real-time, taking less than 10 milliseconds even in high-density traffic with over 10,000 vehicles per hour. Compared to fully optimization-based methods, it operates 100 times faster while ensuring fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, reduces the time to reach the goal by at least 70%, and decreases fuel consumption by 50% compared to auction-based and signaled approaches using traffic lights and stop signs. GameOpt+ is also unaffected by unbalanced traffic inflows, whereas some of the other baselines encountered a decrease in performance in unbalanced traffic inflow environments.
Towards Efficient Risk-Sensitive Policy Gradient: An Iteration Complexity Analysis
Mar 13, 2024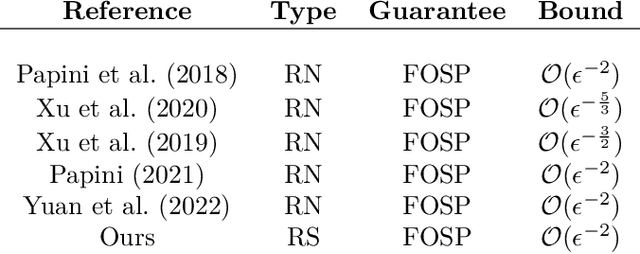
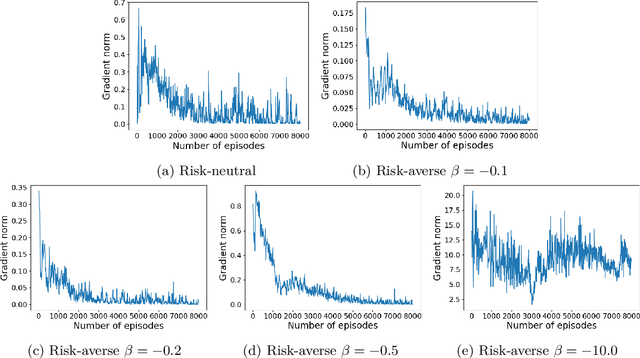
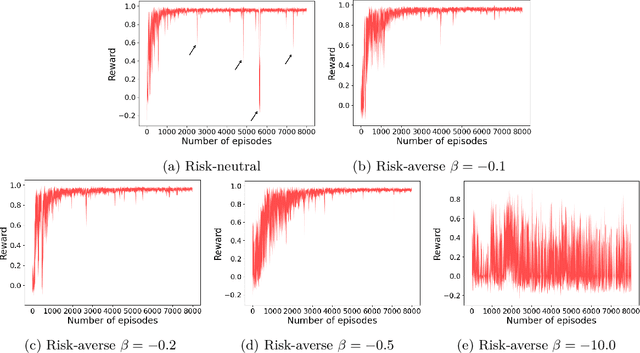
Reinforcement Learning (RL) has shown exceptional performance across various applications, enabling autonomous agents to learn optimal policies through interaction with their environments. However, traditional RL frameworks often face challenges in terms of iteration complexity and robustness. Risk-sensitive RL, which balances expected return and risk, has been explored for its potential to yield probabilistically robust policies, yet its iteration complexity analysis remains underexplored. In this study, we conduct a thorough iteration complexity analysis for the risk-sensitive policy gradient method, focusing on the REINFORCE algorithm and employing the exponential utility function. We obtain an iteration complexity of $\mathcal{O}(\epsilon^{-2})$ to reach an $\epsilon$-approximate first-order stationary point (FOSP). We investigate whether risk-sensitive algorithms can achieve better iteration complexity compared to their risk-neutral counterparts. Our theoretical analysis demonstrates that risk-sensitive REINFORCE can have a reduced number of iterations required for convergence. This leads to improved iteration complexity, as employing the exponential utility does not entail additional computation per iteration. We characterize the conditions under which risk-sensitive algorithms can achieve better iteration complexity. Our simulation results also validate that risk-averse cases can converge and stabilize more quickly after approximately half of the episodes compared to their risk-neutral counterparts.
Cooperative Bidirectional Mixed-Traffic Overtaking
Nov 14, 2023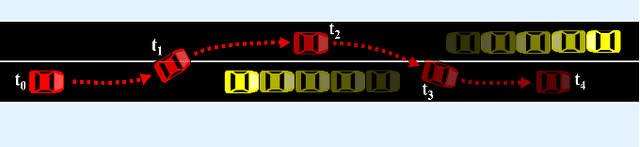
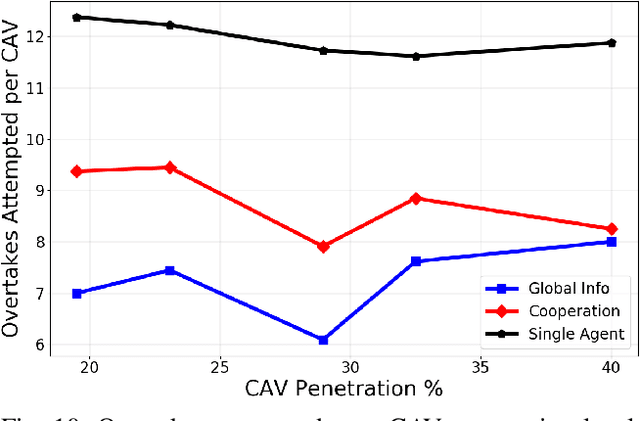
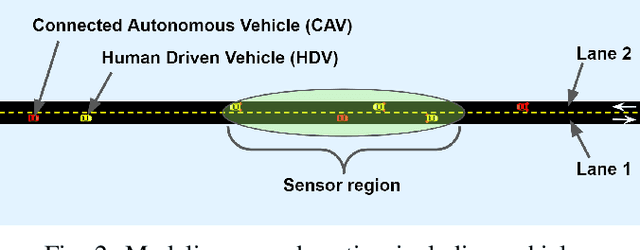
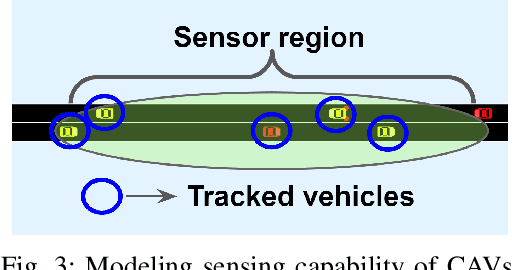
Safe overtaking, especially in a bidirectional mixed-traffic setting, remains a key challenge for Connected Autonomous Vehicles (CAVs). The presence of human-driven vehicles (HDVs), behavior unpredictability, and blind spots resulting from sensor occlusion make this a challenging control problem. To overcome these difficulties, we propose a cooperative communication-based approach that utilizes the information shared between CAVs to reduce the effects of sensor occlusion while benefiting from the local velocity prediction based on past tracking data. Our control framework aims to perform overtaking maneuvers with the objective of maximizing velocity while prioritizing safety and passenger comfort. Our method is also capable of reactively adjusting its plan to dynamic changes in the environment. The performance of the proposed approach is verified using realistic traffic simulations.
* Published in: 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)
Safe Collective Control under Noisy Inputs and Competing Constraints via Non-Smooth Barrier Functions
Nov 06, 2023



We consider the problem of safely coordinating ensembles of identical autonomous agents to conduct complex missions with conflicting safety requirements and under noisy control inputs. Using non-smooth control barrier functions (CBFs) and stochastic model-predictive control as springboards and by adopting an extrinsic approach where the ensemble is treated as a unified dynamic entity, we devise a method to synthesize safety-aware control inputs for uncertain collectives, drawing upon recent developments in Boolean CBF composition and extensions of CBFs to stochastic systems. Specifically, we approximate the combined CBF by a smooth function and solve a stochastic optimization problem, with agent-level forcing terms restricted to the resulting affine subspace of safe control inputs. For the smoothing step, we employ a polynomial approximation scheme, providing evidence for its advantage in generating more conservative yet sufficiently-filtered control signals than the smoother but more aggressive equivalents realized via an approximation technique based on the log-sum-exp function. To further demonstrate the utility of the proposed method, we present bounds for the expected value of the CBF approximation error, along with results from simulations of a single-integrator collective under velocity perturbations, comparing these results with those obtained using a naive state-feedback controller lacking safety filters.
RCMS: Risk-Aware Crash Mitigation System for Autonomous Vehicles
Sep 21, 2023We propose a risk-aware crash mitigation system (RCMS), to augment any existing motion planner (MP), that enables an autonomous vehicle to perform evasive maneuvers in high-risk situations and minimize the severity of collision if a crash is inevitable. In order to facilitate a smooth transition between RCMS and MP, we develop a novel activation mechanism that combines instantaneous as well as predictive collision risk evaluation strategies in a unified hysteresis-band approach. For trajectory planning, we deploy a modular receding horizon optimization-based approach that minimizes a smooth situational risk profile, while adhering to the physical road limits as well as vehicular actuator limits. We demonstrate the performance of our approach in a simulation environment.
Blind Cyclic Prefix-based CFO Estimation in MIMO-OFDM Systems
Aug 29, 2023Low-complexity estimation and correction of carrier frequency offset (CFO) are essential in orthogonal frequency division multiplexing (OFDM). In this paper, we propose a low-overhead blind CFO estimation technique based on cyclic prefix (CP), in multi-input multi-output (MIMO)-OFDM systems. We propose to use antenna diversity for CFO estimation. Given that the RF chains for all antenna elements at a communication node share the same clock, the carrier frequency offset (CFO) between two points may be estimated by using the combination of the received signal at all antennas. We improve our method by combining the antenna diversity with time diversity by considering the CP for multiple OFDM symbols. We provide a closed-form expression for CFO estimation and present algorithms that can considerably improve the CFO estimation performance at the expense of a linear increase in computational complexity. We validate the effectiveness of our estimation scheme via extensive numerical analysis.
SLAS: Speed and Lane Advisory System for Highway Navigation
Mar 01, 2023This paper proposes a hierarchical autonomous vehicle navigation architecture, composed of a high-level speed and lane advisory system (SLAS) coupled with low-level trajectory generation and trajectory following modules. Specifically, we target a multi-lane highway driving scenario where an autonomous ego vehicle navigates in traffic. We propose a novel receding horizon mixed-integer optimization based method for SLAS with the objective to minimize travel time while accounting for passenger comfort. We further incorporate various modifications in the proposed approach to improve the overall computational efficiency and achieve real-time performance. We demonstrate the efficacy of the proposed approach in contrast to the existing methods, when applied in conjunction with state-of-the-art trajectory generation and trajectory following frameworks, in a CARLA simulation environment.
* Presented at the IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 2022
GAMEOPT: Optimal Real-time Multi-Agent Planning and Control for Dynamic Intersections
Mar 18, 2022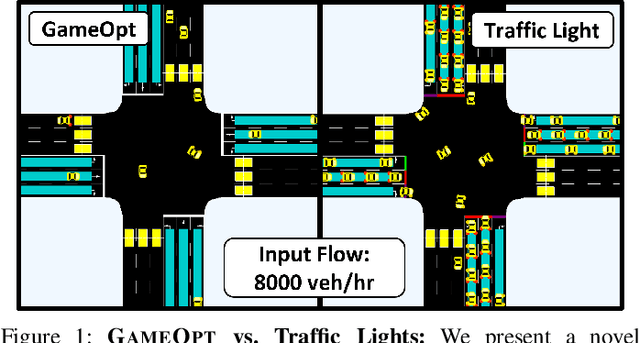
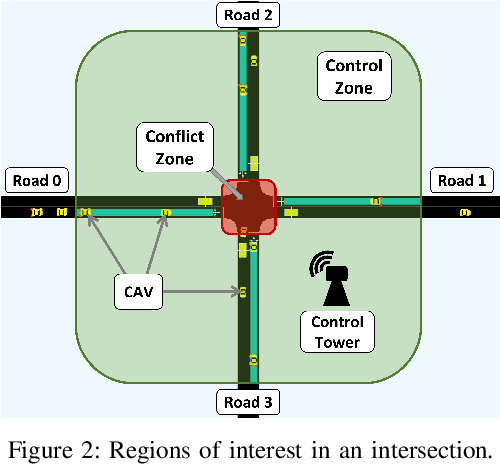
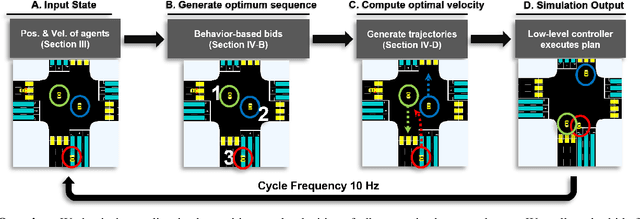
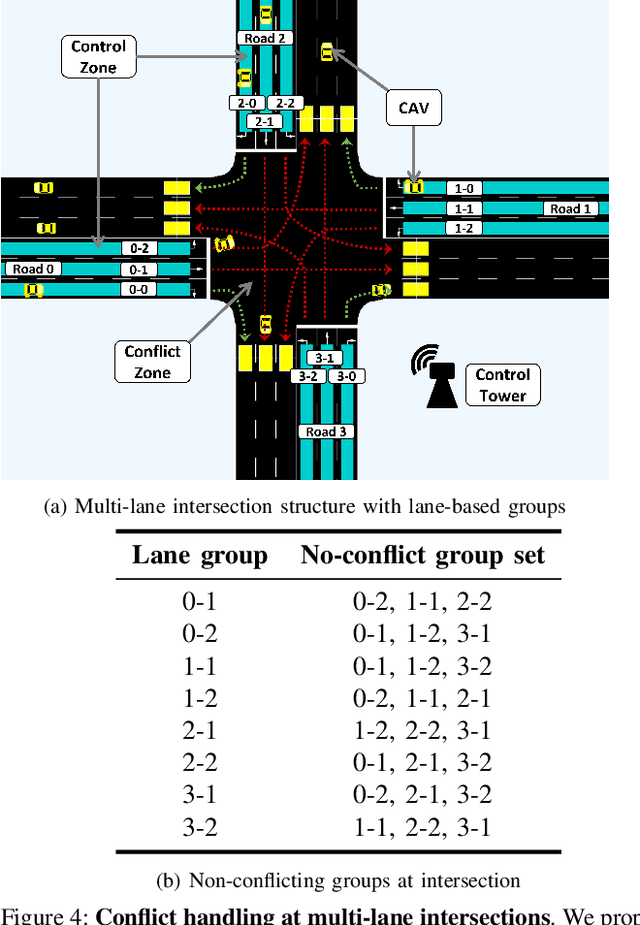
We propose GameOpt: a novel hybrid approach to cooperative intersection control for dynamic, multi-lane, unsignalized intersections. Safely navigating these complex and accident prone intersections requires simultaneous trajectory planning and negotiation among drivers. GameOpt is a hybrid formulation that first uses an auction mechanism to generate a priority entrance sequence for every agent, followed by an optimization-based trajectory planner that computes velocity controls that satisfy the priority sequence. This coupling operates at real-time speeds of less than 10 milliseconds in high density traffic of more than 10,000 vehicles/hr, 100 times faster than other fully optimization-based methods, while providing guarantees in terms of fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, time taken to reach the goal by 75%, and fuel consumption by 33% compared to auction-based approaches and signaled approaches using traffic-lights and stop signs.