 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAMEOPT+: Improving Fuel Efficiency in Unregulated Heterogeneous Traffic Intersections via Optimal Multi-agent Cooperative Control
May 26, 2024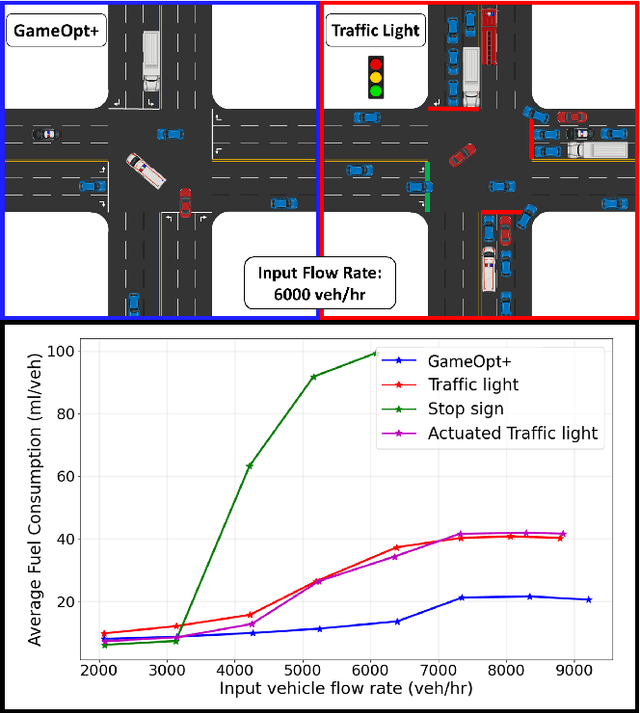
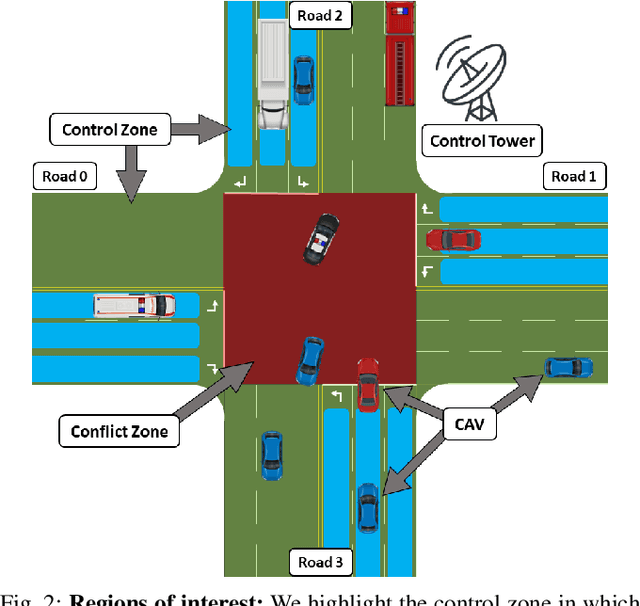
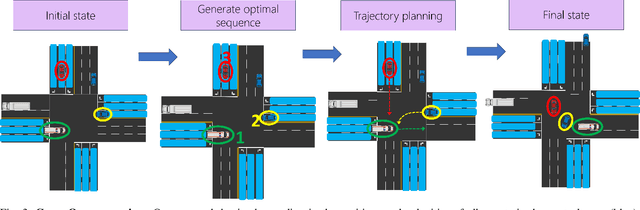
Better fuel efficiency leads to better financial security as well as a cleaner environment. We propose a novel approach for improving fuel efficiency in unstructured and unregulated traffic environments. Existing intelligent transportation solutions for improving fuel efficiency, however, apply only to traffic intersections with sparse traffic or traffic where drivers obey the regulations, or both. We propose GameOpt+, a novel hybrid approach for cooperative intersection control in dynamic, multi-lane, unsignalized intersections. GameOpt+ is a hybrid solution that combines an auction mechanism and an optimization-based trajectory planner. It generates a priority entrance sequence for each agent and computes velocity controls in real-time, taking less than 10 milliseconds even in high-density traffic with over 10,000 vehicles per hour. Compared to fully optimization-based methods, it operates 100 times faster while ensuring fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, reduces the time to reach the goal by at least 70%, and decreases fuel consumption by 50% compared to auction-based and signaled approaches using traffic lights and stop signs. GameOpt+ is also unaffected by unbalanced traffic inflows, whereas some of the other baselines encountered a decrease in performance in unbalanced traffic inflow environments.
Decentralized Social Navigation with Non-Cooperative Robots via Bi-Level Optimization
Jun 15, 2023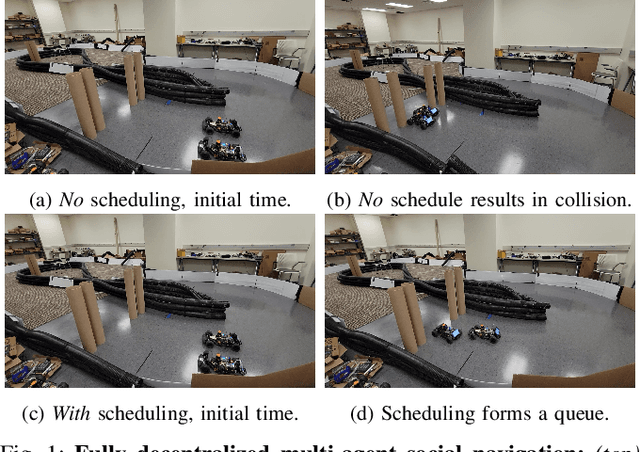
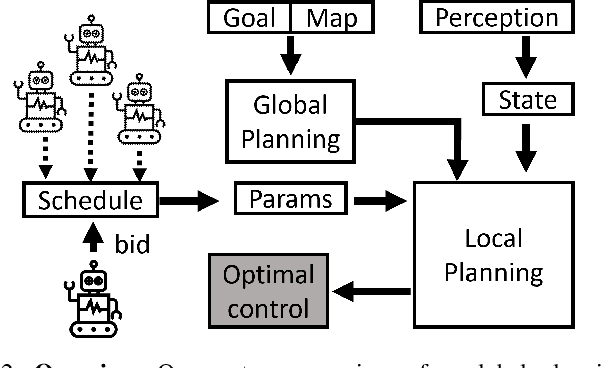
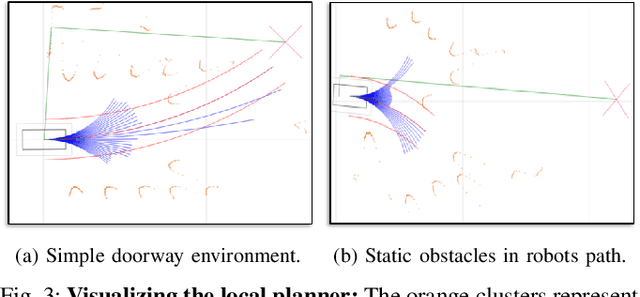
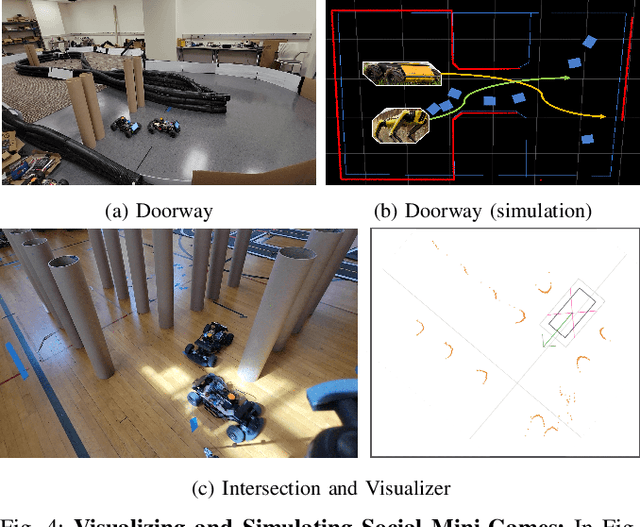
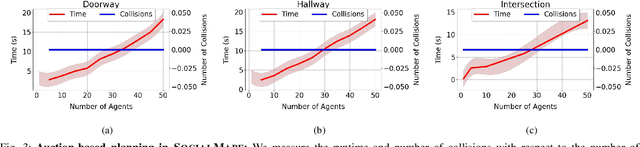
This paper presents a fully decentralized approach for realtime non-cooperative multi-robot navigation in social mini-games, such as navigating through a narrow doorway or negotiating right of way at a corridor intersection. Our contribution is a new realtime bi-level optimization algorithm, in which the top-level optimization consists of computing a fair and collision-free ordering followed by the bottom-level optimization which plans optimal trajectories conditioned on the ordering. We show that, given such a priority order, we can impose simple kinodynamic constraints on each robot that are sufficient for it to plan collision-free trajectories with minimal deviation from their preferred velocities, similar to how humans navigate in these scenarios. We successfully deploy the proposed algorithm in the real world using F$1/10$ robots, a Clearpath Jackal, and a Boston Dynamics Spot as well as in simulation using the SocialGym 2.0 multi-agent social navigation simulator, in the doorway and corridor intersection scenarios. We compare with state-of-the-art social navigation methods using multi-agent reinforcement learning, collision avoidance algorithms, and crowd simulation models. We show that $(i)$ classical navigation performs $44\%$ better than the state-of-the-art learning-based social navigation algorithms, $(ii)$ without a scheduling protocol, our approach results in collisions in social mini-games $(iii)$ our approach yields $2\times$ and $5\times$ fewer velocity changes than CADRL in doorways and intersections, and finally $(iv)$ bi-level navigation in doorways at a flow rate of $2.8 - 3.3$ (ms)$^{-1}$ is comparable to flow rate in human navigation at a flow rate of $4$ (ms)$^{-1}$.
SOCIALMAPF: Optimal and Efficient Multi-Agent Path Finding with Strategic Agents for Social Navigation
Oct 15, 2022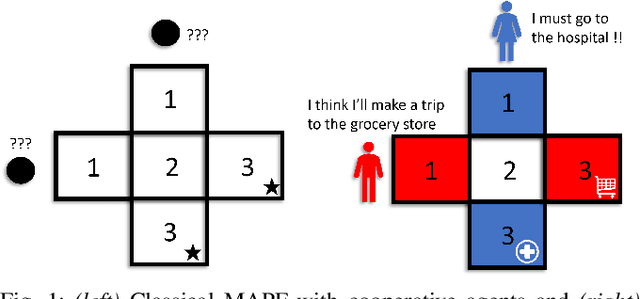


We propose an extension to the MAPF formulation, called SocialMAPF, to account for private incentives of agents in constrained environments such as doorways, narrow hallways, and corridor intersections. SocialMAPF is able to, for instance, accurately reason about the urgent incentive of an agent rushing to the hospital over another agent's less urgent incentive of going to a grocery store; MAPF ignores such agent-specific incentives. Our proposed formulation addresses the open problem of optimal and efficient path planning for agents with private incentives. To solve SocialMAPF, we propose a new class of algorithms that use mechanism design during conflict resolution to simultaneously optimize agents' private local utilities and the global system objective. We perform an extensive array of experiments that show that optimal search-based MAPF techniques lead to collisions and increased time-to-goal in SocialMAPF compared to our proposed method using mechanism design. Furthermore, we empirically demonstrate that mechanism design results in models that maximizes agent utility and minimizes the overall time-to-goal of the entire system. We further showcase the capabilities of mechanism design-based planning by successfully deploying it in environments with static obstacles. To conclude, we briefly list several research directions using the SocialMAPF formulation, such as exploring motion planning in the continuous domain for agents with private incentives.