 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFauna Sprout: A lightweight, approachable, developer-ready humanoid robot
Jan 26, 2026Recent advances in learned control, large-scale simulation, and generative models have accelerated progress toward general-purpose robotic controllers, yet the field still lacks platforms suitable for safe, expressive, long-term deployment in human environments. Most existing humanoids are either closed industrial systems or academic prototypes that are difficult to deploy and operate around people, limiting progress in robotics. We introduce Sprout, a developer platform designed to address these limitations through an emphasis on safety, expressivity, and developer accessibility. Sprout adopts a lightweight form factor with compliant control, limited joint torques, and soft exteriors to support safe operation in shared human spaces. The platform integrates whole-body control, manipulation with integrated grippers, and virtual-reality-based teleoperation within a unified hardware-software stack. An expressive head further enables social interaction -- a domain that remains underexplored on most utilitarian humanoids. By lowering physical and technical barriers to deployment, Sprout expands access to capable humanoid platforms and provides a practical basis for developing embodied intelligence in real human environments.
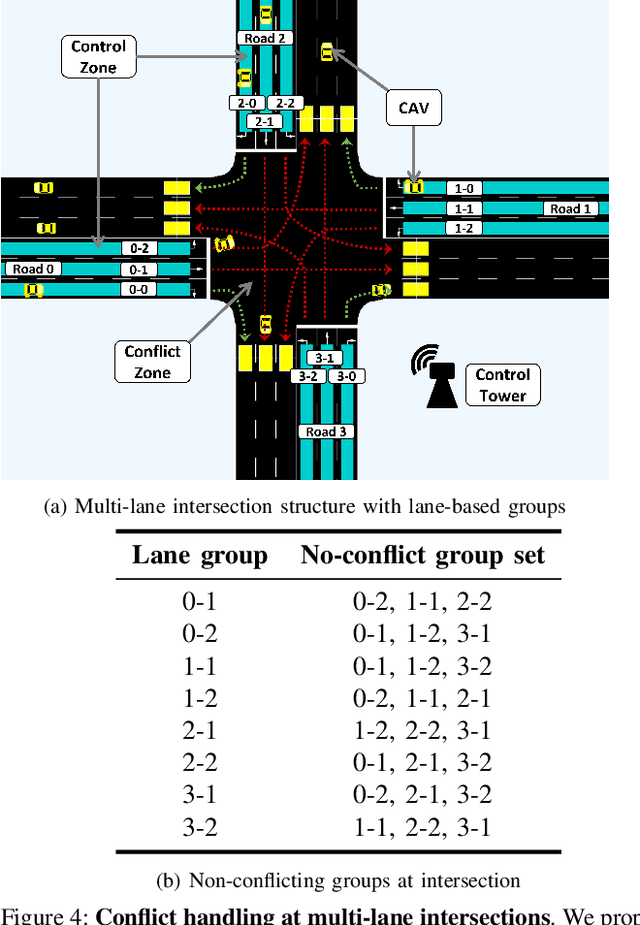
GAMEOPT+: Improving Fuel Efficiency in Unregulated Heterogeneous Traffic Intersections via Optimal Multi-agent Cooperative Control
May 26, 2024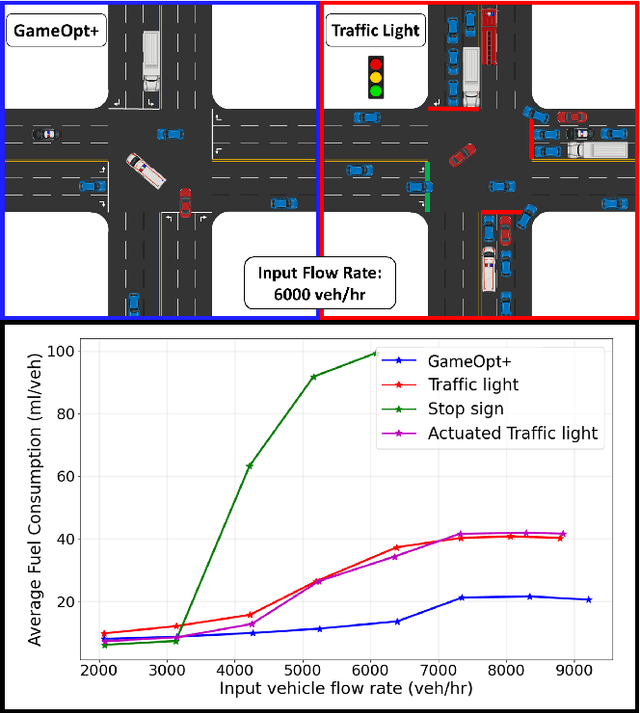
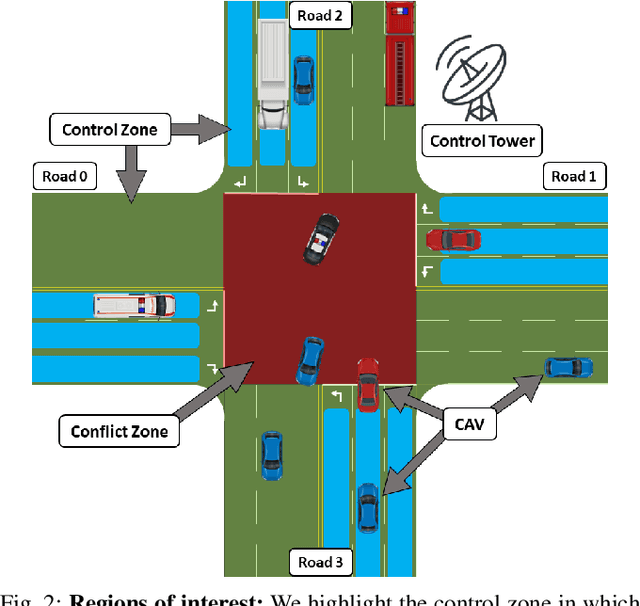
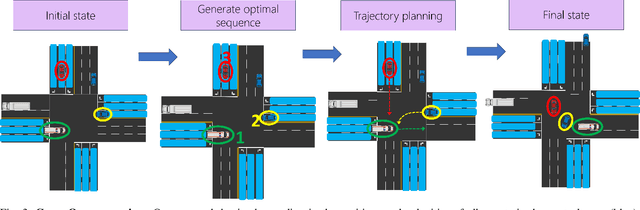
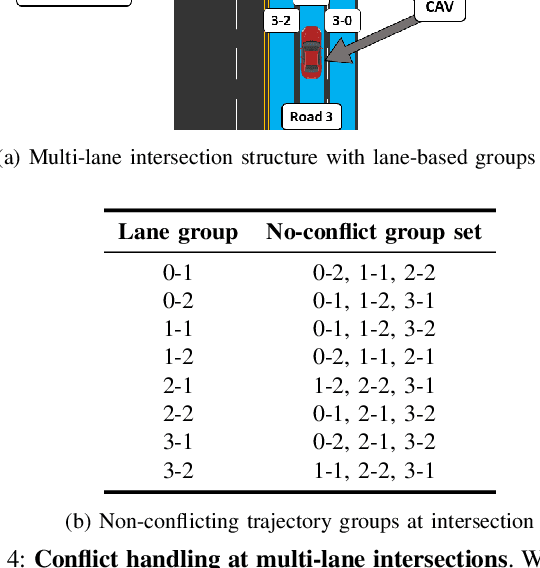
Better fuel efficiency leads to better financial security as well as a cleaner environment. We propose a novel approach for improving fuel efficiency in unstructured and unregulated traffic environments. Existing intelligent transportation solutions for improving fuel efficiency, however, apply only to traffic intersections with sparse traffic or traffic where drivers obey the regulations, or both. We propose GameOpt+, a novel hybrid approach for cooperative intersection control in dynamic, multi-lane, unsignalized intersections. GameOpt+ is a hybrid solution that combines an auction mechanism and an optimization-based trajectory planner. It generates a priority entrance sequence for each agent and computes velocity controls in real-time, taking less than 10 milliseconds even in high-density traffic with over 10,000 vehicles per hour. Compared to fully optimization-based methods, it operates 100 times faster while ensuring fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, reduces the time to reach the goal by at least 70%, and decreases fuel consumption by 50% compared to auction-based and signaled approaches using traffic lights and stop signs. GameOpt+ is also unaffected by unbalanced traffic inflows, whereas some of the other baselines encountered a decrease in performance in unbalanced traffic inflow environments.
Cooperative Bidirectional Mixed-Traffic Overtaking
Nov 14, 2023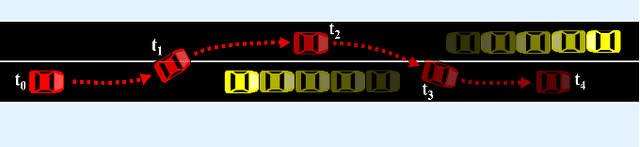
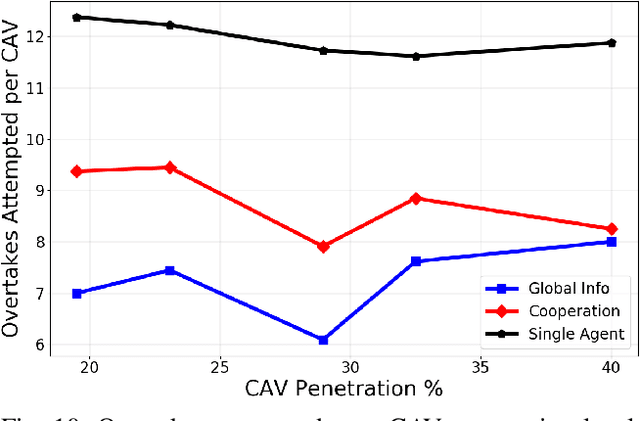
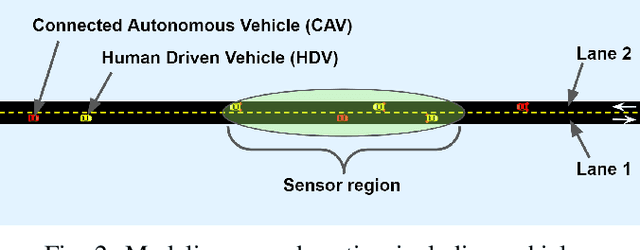
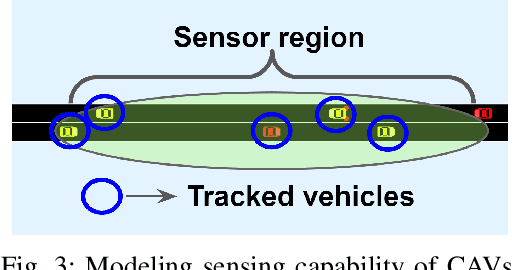
Safe overtaking, especially in a bidirectional mixed-traffic setting, remains a key challenge for Connected Autonomous Vehicles (CAVs). The presence of human-driven vehicles (HDVs), behavior unpredictability, and blind spots resulting from sensor occlusion make this a challenging control problem. To overcome these difficulties, we propose a cooperative communication-based approach that utilizes the information shared between CAVs to reduce the effects of sensor occlusion while benefiting from the local velocity prediction based on past tracking data. Our control framework aims to perform overtaking maneuvers with the objective of maximizing velocity while prioritizing safety and passenger comfort. Our method is also capable of reactively adjusting its plan to dynamic changes in the environment. The performance of the proposed approach is verified using realistic traffic simulations.
* Published in: 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)
GAMEOPT: Optimal Real-time Multi-Agent Planning and Control for Dynamic Intersections
Mar 18, 2022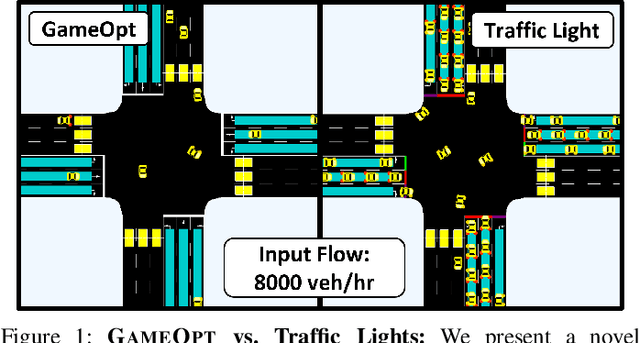
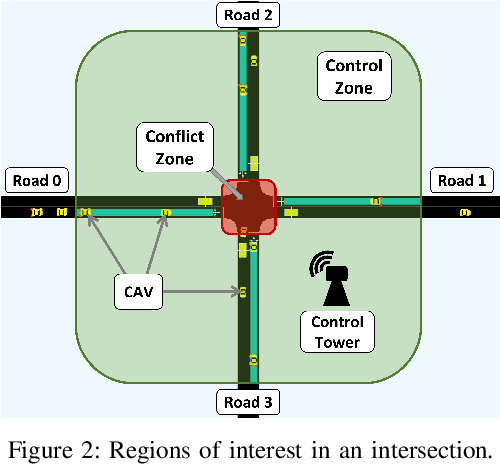
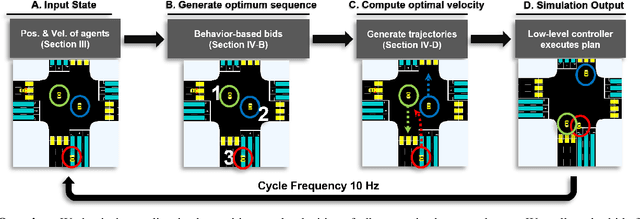
We propose GameOpt: a novel hybrid approach to cooperative intersection control for dynamic, multi-lane, unsignalized intersections. Safely navigating these complex and accident prone intersections requires simultaneous trajectory planning and negotiation among drivers. GameOpt is a hybrid formulation that first uses an auction mechanism to generate a priority entrance sequence for every agent, followed by an optimization-based trajectory planner that computes velocity controls that satisfy the priority sequence. This coupling operates at real-time speeds of less than 10 milliseconds in high density traffic of more than 10,000 vehicles/hr, 100 times faster than other fully optimization-based methods, while providing guarantees in terms of fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, time taken to reach the goal by 75%, and fuel consumption by 33% compared to auction-based approaches and signaled approaches using traffic-lights and stop signs.