 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Bidirectional Mixed-Traffic Overtaking
Paper and Code
Nov 14, 2023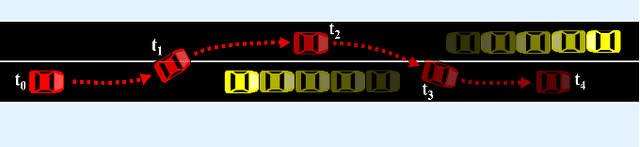
Safe overtaking, especially in a bidirectional mixed-traffic setting, remains a key challenge for Connected Autonomous Vehicles (CAVs). The presence of human-driven vehicles (HDVs), behavior unpredictability, and blind spots resulting from sensor occlusion make this a challenging control problem. To overcome these difficulties, we propose a cooperative communication-based approach that utilizes the information shared between CAVs to reduce the effects of sensor occlusion while benefiting from the local velocity prediction based on past tracking data. Our control framework aims to perform overtaking maneuvers with the objective of maximizing velocity while prioritizing safety and passenger comfort. Our method is also capable of reactively adjusting its plan to dynamic changes in the environment. The performance of the proposed approach is verified using realistic traffic simulations.