 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Pose Estimation for UAV Autonomous Navigation andLanding Using Visual-Inertial Sensor Data
Paper and Code
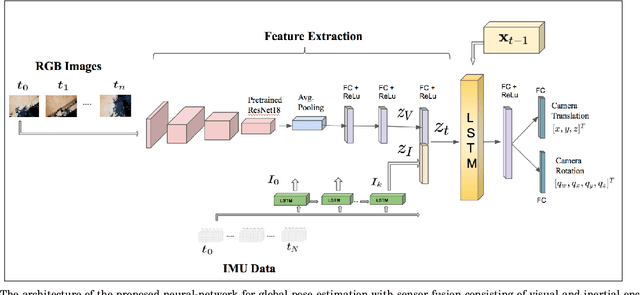
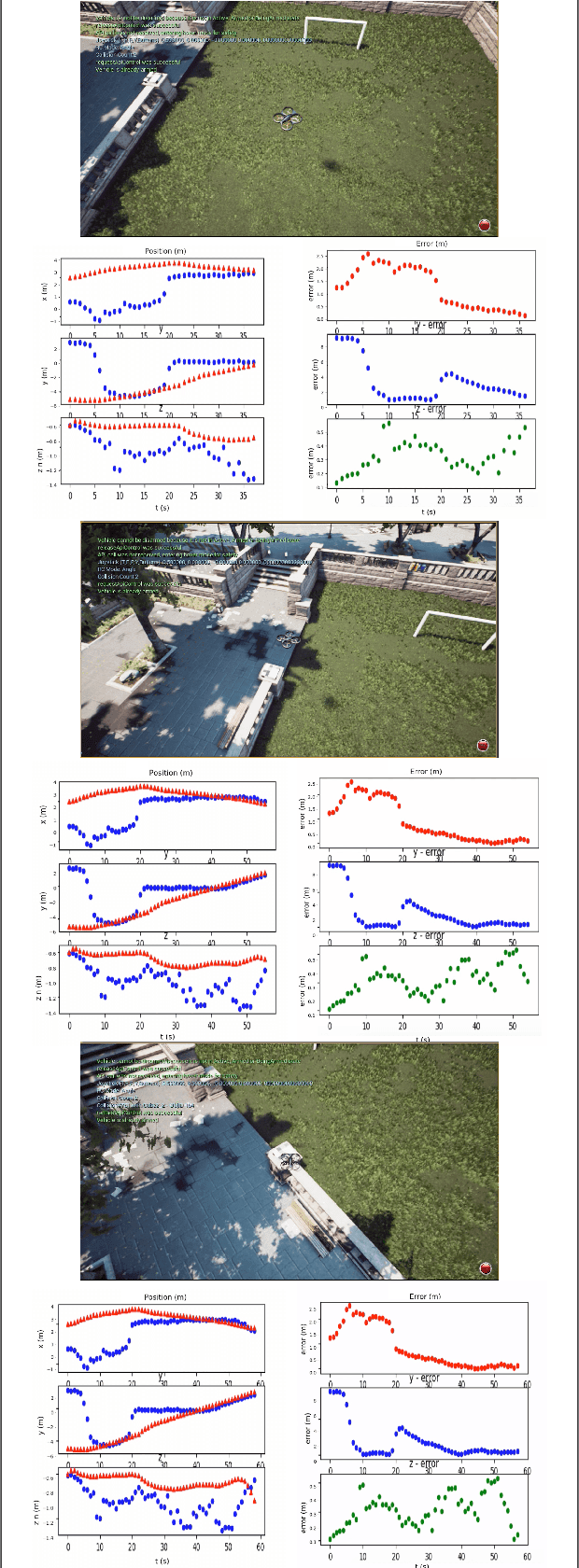
In this work, we propose a robust network-in-the-loop control system that allows an Unmanned-Aerial-Vehicles to navigate and land autonomously ona desired target. To estimate the global pose of theaerial vehicle, we develop a deep neural network ar-chitecture for visual-inertial odometry, which providesa robust alternative to traditional techniques for au-tonomous navigation of Unmanned-Aerial-Vehicles. Wefirst provide experimental results on the accuracy ofthe estimation by comparing the prediction of our modelto traditional visual-inertial approaches on the publiclyavailable EuRoC MAV dataset. The results indicate aclear improvement in the accuracy of the pose estima-tion up to 25% against the baseline. Second, we useAirsim, a simulator available as a plugin for UnrealEngine, to create new datasets of photorealistic imagesand inertial measurement to train and test our model.We finally integrate the proposed architecture for globallocalization with the Airsim closed-loop control system,and we provide simulation results for the autonomouslanding of the aerial vehicle.