 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScale-Invariant Specifications for Human-Swarm Systems
Dec 12, 2022



We present a method for controlling a swarm using its spectral decomposition -- that is, by describing the set of trajectories of a swarm in terms of a spatial distribution throughout the operational domain -- guaranteeing scale invariance with respect to the number of agents both for computation and for the operator tasked with controlling the swarm. We use ergodic control, decentralized across the network, for implementation. In the DARPA OFFSET program field setting, we test this interface design for the operator using the STOMP interface -- the same interface used by Raytheon BBN throughout the duration of the OFFSET program. In these tests, we demonstrate that our approach is scale-invariant -- the user specification does not depend on the number of agents; it is persistent -- the specification remains active until the user specifies a new command; and it is real-time -- the user can interact with and interrupt the swarm at any time. Moreover, we show that the spectral/ergodic specification of swarm behavior degrades gracefully as the number of agents goes down, enabling the operator to maintain the same approach as agents become disabled or are added to the network. We demonstrate the scale-invariance and dynamic response of our system in a field relevant simulator on a variety of tactical scenarios with up to 50 agents. We also demonstrate the dynamic response of our system in the field with a smaller team of agents. Lastly, we make the code for our system available.
A Game Benchmark for Real-Time Human-Swarm Control
Oct 28, 2022



We present a game benchmark for testing human-swarm control algorithms and interfaces in a real-time, high-cadence scenario. Our benchmark consists of a swarm vs. swarm game in a virtual ROS environment in which the goal of the game is to capture all agents from the opposing swarm; the game's high-cadence is a result of the capture rules, which cause agent team sizes to fluctuate rapidly. These rules require players to consider both the number of agents currently at their disposal and the behavior of their opponent's swarm when they plan actions. We demonstrate our game benchmark with a default human-swarm control system that enables a player to interact with their swarm through a high-level touchscreen interface. The touchscreen interface transforms player gestures into swarm control commands via a low-level decentralized ergodic control framework. We compare our default human-swarm control system to a flocking-based control system, and discuss traits that are crucial for swarm control algorithms and interfaces operating in real-time, high-cadence scenarios like our game benchmark. Our game benchmark code is available on Github; more information can be found at https://sites.google.com/view/swarm-game-benchmark.
Recognition and Co-Analysis of Pedestrian Activities in Different Parts of Road using Traffic Camera Video
Nov 27, 2021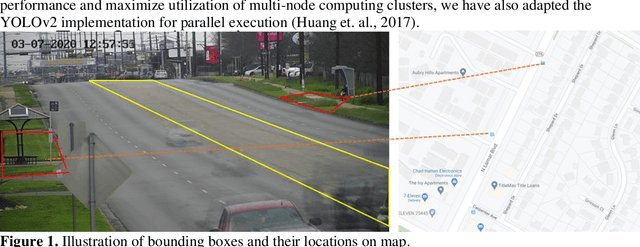

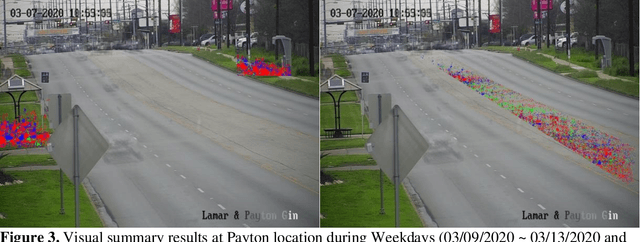
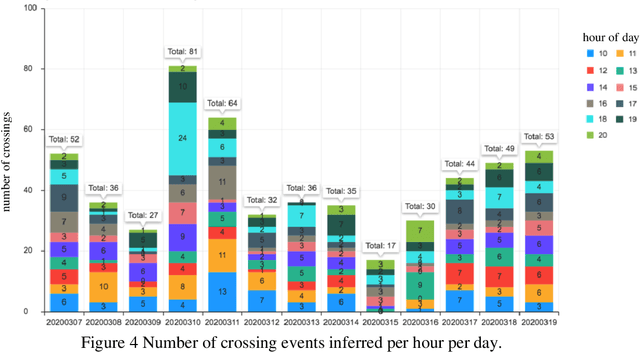
Pedestrian safety is a priority for transportation system managers and operators, and a main focus of the Vision Zero strategy employed by the City of Austin, Texas. While there are a number of treatments and technologies to effectively improve pedestrian safety, identifying the location where these treatments are most needed remains a challenge. Current practice requires manual observation of candidate locations for limited time periods, leading to an identification process that is time consuming, lags behind traffic pattern changes over time, and lacks scalability. Mid-block locations, where safety countermeasures are often needed the most, are especially hard to identify and monitor. The goal for this research is to understand the correlation between bus stop locations and mid-block crossings, so as to assist traffic engineers in implementing Vision Zero strategies to improve pedestrian safety. In a prior work, we have developed a tool to detect pedestrian crossing events with traffic camera video using a deep neural network model to identify crossing events. In this paper, we extend the methods to identify bus stop usage with traffic camera video from off-the-shelf CCTV pan-tilt-zoom (PTZ) traffic monitoring cameras installed at nearby intersections. We correlate the video detection results for mid-block crossings near a bus stop, with pedestrian activity at the bus stops in each side of the mid-block crossing. We also implement a web portal to facilitate manual review of pedestrian activity detections by automating creation of video clips that show only crossing events, thereby vastly improving the efficiency of the human review process.