 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScale-Invariant Specifications for Human-Swarm Systems
Dec 12, 2022



We present a method for controlling a swarm using its spectral decomposition -- that is, by describing the set of trajectories of a swarm in terms of a spatial distribution throughout the operational domain -- guaranteeing scale invariance with respect to the number of agents both for computation and for the operator tasked with controlling the swarm. We use ergodic control, decentralized across the network, for implementation. In the DARPA OFFSET program field setting, we test this interface design for the operator using the STOMP interface -- the same interface used by Raytheon BBN throughout the duration of the OFFSET program. In these tests, we demonstrate that our approach is scale-invariant -- the user specification does not depend on the number of agents; it is persistent -- the specification remains active until the user specifies a new command; and it is real-time -- the user can interact with and interrupt the swarm at any time. Moreover, we show that the spectral/ergodic specification of swarm behavior degrades gracefully as the number of agents goes down, enabling the operator to maintain the same approach as agents become disabled or are added to the network. We demonstrate the scale-invariance and dynamic response of our system in a field relevant simulator on a variety of tactical scenarios with up to 50 agents. We also demonstrate the dynamic response of our system in the field with a smaller team of agents. Lastly, we make the code for our system available.
Ergodic Specifications for Flexible Swarm Control: From User Commands to Persistent Adaptation
Jun 10, 2020
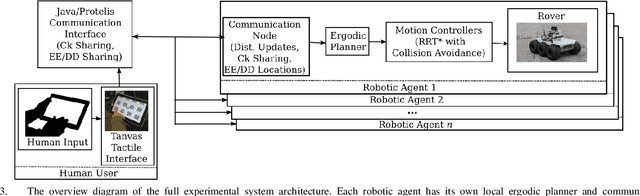
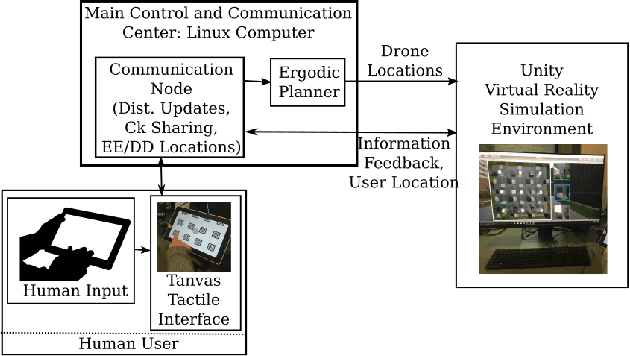

This paper presents a formulation for swarm control and high-level task planning that is dynamically responsive to user commands and adaptable to environmental changes. We design an end-to-end pipeline from a tactile tablet interface for user commands to onboard control of robotic agents based on decentralized ergodic coverage. Our approach demonstrates reliable and dynamic control of a swarm collective through the use of ergodic specifications for planning and executing agent trajectories as well as responding to user and external inputs. We validate our approach in a virtual reality simulation environment and in real-world experiments at the DARPA OFFSET Urban Swarm Challenge FX3 field tests with a robotic swarm where user-based control of the swarm and mission-based tasks require a dynamic and flexible response to changing conditions and objectives in real-time.
NFL Play Prediction
Jan 04, 2016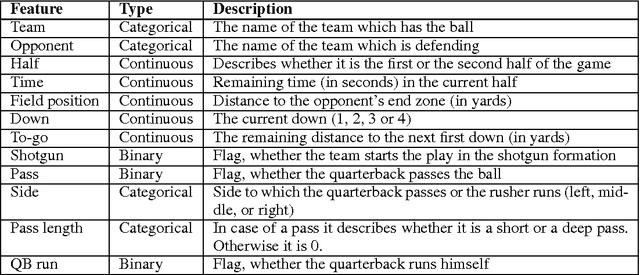

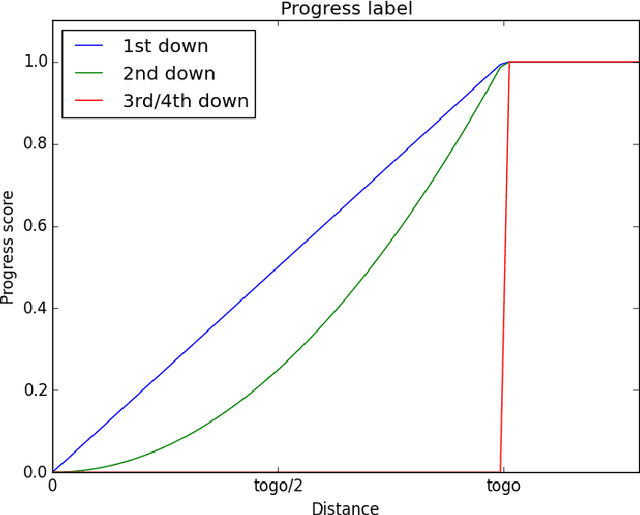
Based on NFL game data we try to predict the outcome of a play in multiple different ways. An application of this is the following: by plugging in various play options one could determine the best play for a given situation in real time. While the outcome of a play can be described in many ways we had the most promising results with a newly defined measure that we call "progress". We see this work as a first step to include predictive analysis into NFL playcalling.