 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWord2vec to behavior: morphology facilitates the grounding of language in machines
Aug 03, 2019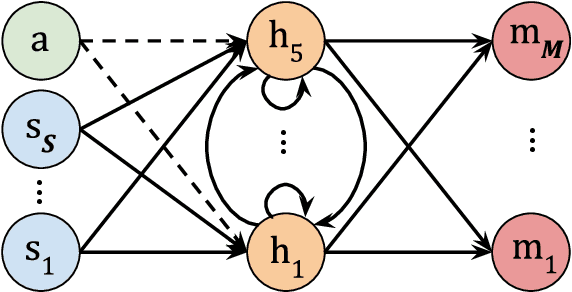


Enabling machines to respond appropriately to natural language commands could greatly expand the number of people to whom they could be of service. Recently, advances in neural network-trained word embeddings have empowered non-embodied text-processing algorithms, and suggest they could be of similar utility for embodied machines. Here we introduce a method that does so by training robots to act similarly to semantically-similar word2vec encoded commands. We show that this enables them to act appropriately, after training, to previously-unheard commands. Finally, we show that inducing such an alignment between motoric and linguistic similarities can be facilitated or hindered by the mechanical structure of the robot. This points to future, large scale methods that find and exploit relationships between action, language, and robot structure.