 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCreating manufacturable blueprints for coarse-grained virtual robots
Mar 13, 2026Over the past three decades, countless embodied yet virtual agents have freely evolved inside computer simulations, but vanishingly few were realized as physical robots. This is because evolution was conducted at a level of abstraction that was convenient for freeform body generation (creation, mutation, recombination) but swept away almost all of the physical details of functional body parts. The resulting designs were crude and underdetermined, requiring considerable effort and expertise to convert into a manufacturable format. Here, we automate this mapping from simplified design spaces that are readily evolvable to complete blueprints that can be directly followed by a builder. The pipeline incrementally resolves manufacturing constraints by embedding the structural and functional semantics of motors, electronics, batteries, and wiring into the abstract virtual design. In lieu of evolution, a user-defined or AI-generated ``sketch'' of a body plan can also be fed as input to the pipeline, providing a versatile framework for accelerating the design of novel robots.
Generating Freeform Endoskeletal Robots
Dec 02, 2024



The automatic design of embodied agents (e.g. robots) has existed for 31 years and is experiencing a renaissance of interest in the literature. To date however, the field has remained narrowly focused on two kinds of anatomically simple robots: (1) fully rigid, jointed bodies; and (2) fully soft, jointless bodies. Here we bridge these two extremes with the open ended creation of terrestrial endoskeletal robots: deformable soft bodies that leverage jointed internal skeletons to move efficiently across land. Simultaneous de novo generation of external and internal structures is achieved by (i) modeling 3D endoskeletal body plans as integrated collections of elastic and rigid cells that directly attach to form soft tissues anchored to compound rigid bodies; (ii) encoding these discrete mechanical subsystems into a continuous yet coherent latent embedding; (iii) optimizing the sensorimotor coordination of each decoded design using model-free reinforcement learning; and (iv) navigating this smooth yet highly non-convex latent manifold using evolutionary strategies. This yields an endless stream of novel species of "higher robots" that, like all higher animals, harness the mechanical advantages of both elastic tissues and skeletal levers for terrestrial travel. It also provides a plug-and-play experimental platform for benchmarking evolutionary design and representation learning algorithms in complex hierarchical embodied systems.
Reinforcement learning for freeform robot design
Oct 09, 2023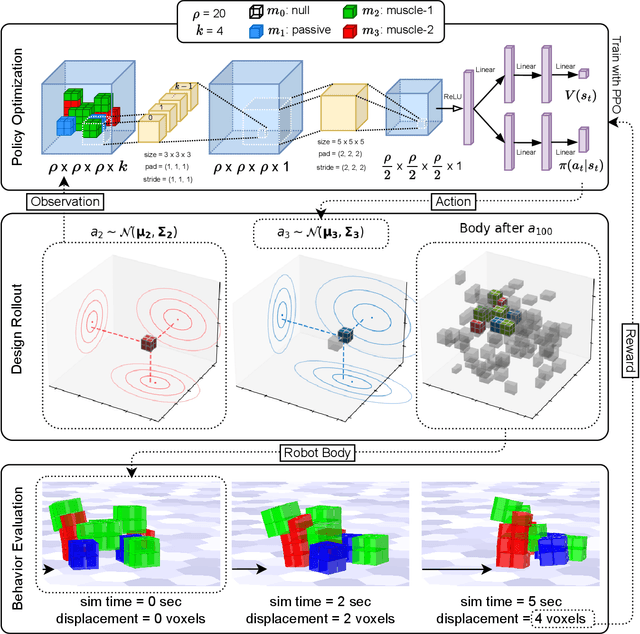
Inspired by the necessity of morphological adaptation in animals, a growing body of work has attempted to expand robot training to encompass physical aspects of a robot's design. However, reinforcement learning methods capable of optimizing the 3D morphology of a robot have been restricted to reorienting or resizing the limbs of a predetermined and static topological genus. Here we show policy gradients for designing freeform robots with arbitrary external and internal structure. This is achieved through actions that deposit or remove bundles of atomic building blocks to form higher-level nonparametric macrostructures such as appendages, organs and cavities. Although results are provided for open loop control only, we discuss how this method could be adapted for closed loop control and sim2real transfer to physical machines in future.