 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStretchable Arduinos embedded in soft robots
Sep 16, 2024To achieve real-world functionality, robots must have the ability to carry out decision-making computations. However, soft robots stretch and therefore need a solution other than rigid computers. Examples of embedding computing capacity into soft robots currently include appending rigid printed circuit boards (PCBs) to the robot, integrating soft logic gates, and exploiting material responses for material-embedded computation. Although promising, these approaches introduce limitations such as rigidity, tethers, or low logic gate density. The field of stretchable electronics has sought to solve these challenges, but a complete pipeline for direct integration of single-board computers, microcontrollers, and other complex circuitry into soft robots has remained elusive. We present a generalized method to translate any complex two-layer circuit into a soft, stretchable form. This enabled the creation of stretchable single-board microcontrollers (including Arduinos) and other commercial circuits (including Sparkfun circuits), without design simplifications. As demonstrations of the method's utility, we embed highly stretchable (>300% strain) Arduino Pro Minis into the bodies of multiple soft robots. This makes use of otherwise inert structural material, fulfilling the promise of the stretchable electronics field to integrate state-of-the-art computational power into robust, stretchable systems during active use.
* 45 pages, 19 figures total. Main text is 28 pages with 6 figures. The rest is supplementary
Gaining environments through shape change
Aug 14, 2020
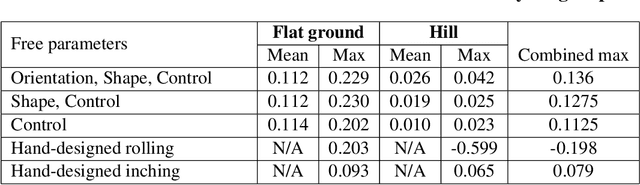


Many organisms, including various species of spiders and caterpillars, change their shape to switch gaits and adapt to different environments. Recent technological advances, ranging from stretchable circuits to highly deformable soft robots, have begun to make shape changing robots a possibility. However, it is currently unclear how and when shape change should occur, and what capabilities could be gained, leading to a wide range of unsolved design and control problems. To begin addressing these questions, here we simulate, design, and build a soft robot that utilizes shape change to achieve locomotion over both a flat and inclined surface. Modeling this robot in simulation, we explore its capabilities in two environments and demonstrate the automated discovery of environment-specific shapes and gaits that successfully transfer to the physical hardware. We found that the shape-changing robot traverses these environments better than an equivalent but non-morphing robot, in simulation and reality.