 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective Control for Arbitrary Configurations of Docked Modboats
Paper and Code
Sep 08, 2022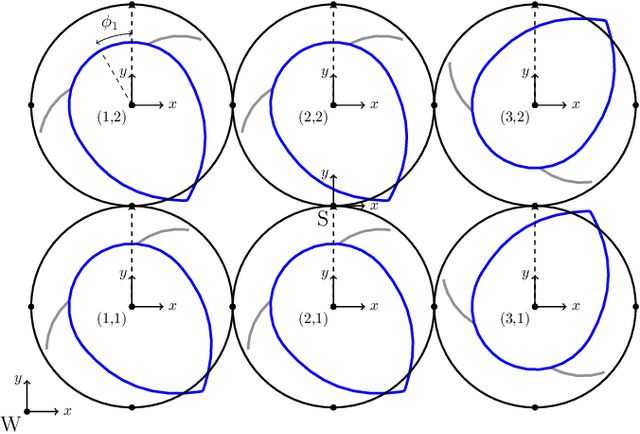
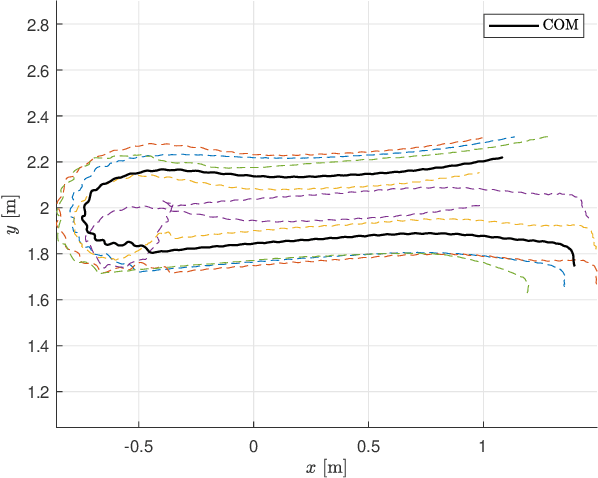
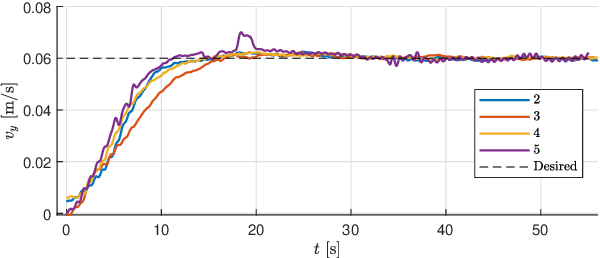
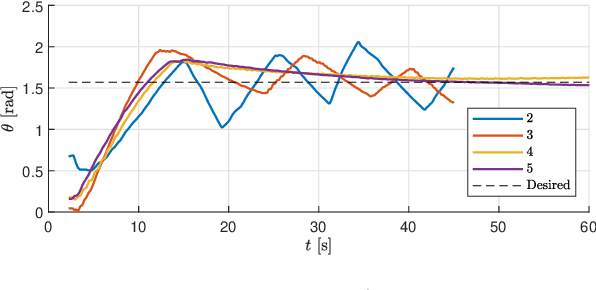
The Modboat is a low-cost, underactuated, modular robot capable of surface swimming, docking to other modules, and undocking from them using only a single motor and two passive flippers. Undocking is achieved by causing intentional self-collision between the tails of neighboring modules in certain configurations; this becomes a challenge, however, when collective swimming as one connected component is desirable. In this work, we develop a centralized control strategy to allow \textit{arbitrary} configurations of Modboats to swim as a single steerable vehicle and guarantee no accidental undocking. We also present a simplified model for hydrodynamic interactions between boats in a configuration that is tractable for real-time control. We experimentally demonstrate that our controller performs well, is consistent for configurations of various sizes and shapes, and can control both surge velocity and yaw angle simultaneously. Controllability is maintained while swimming, but pure yaw control causes lateral movement that cannot be counteracted by the presented framework.