 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHolonomic Control of Arbitrary Configurations of Docked Modboats
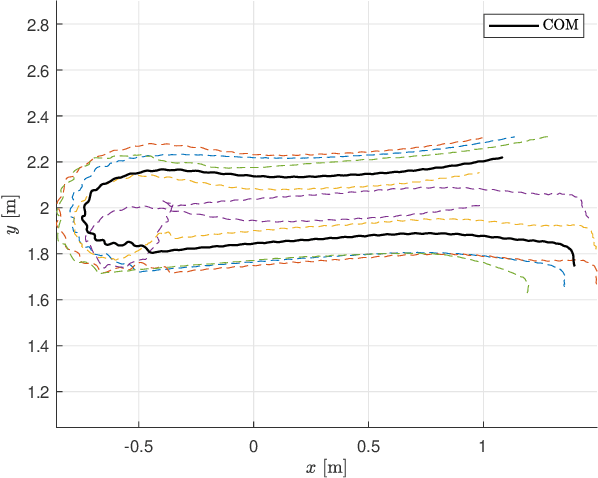
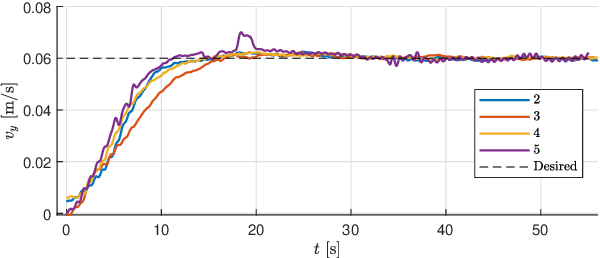
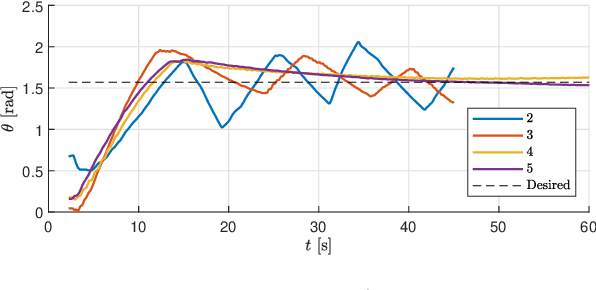
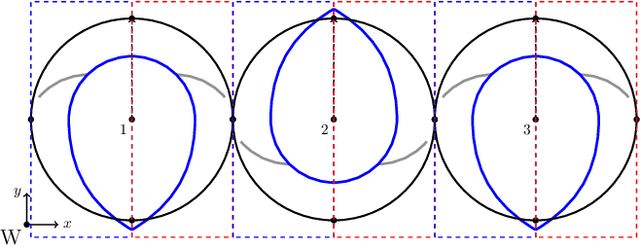
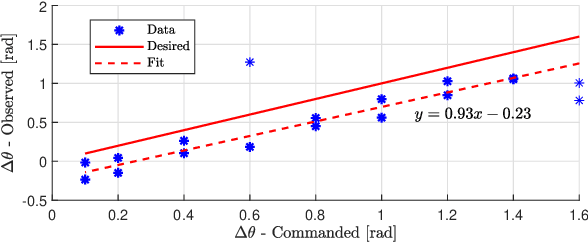
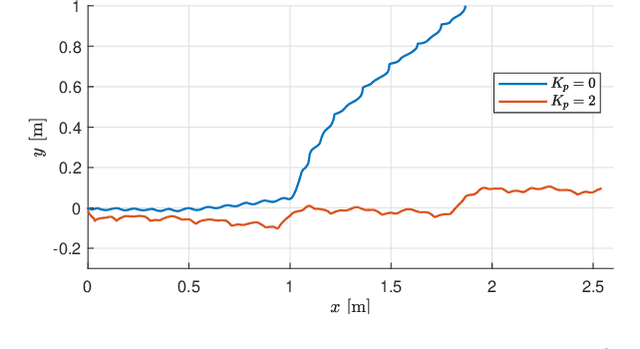
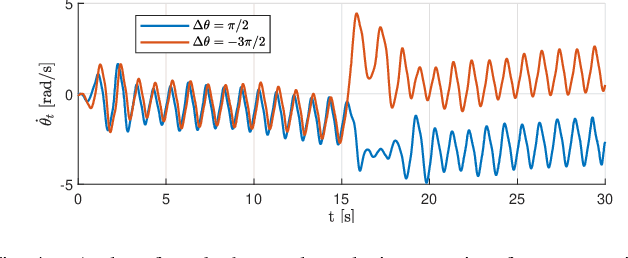
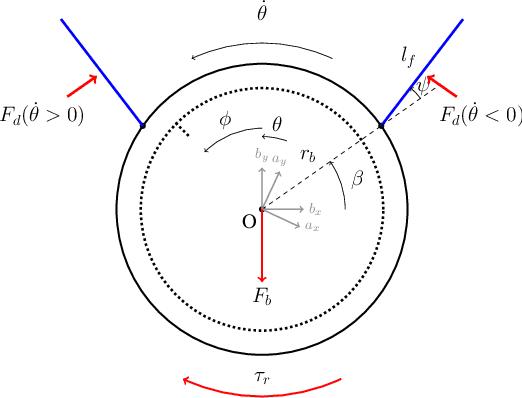
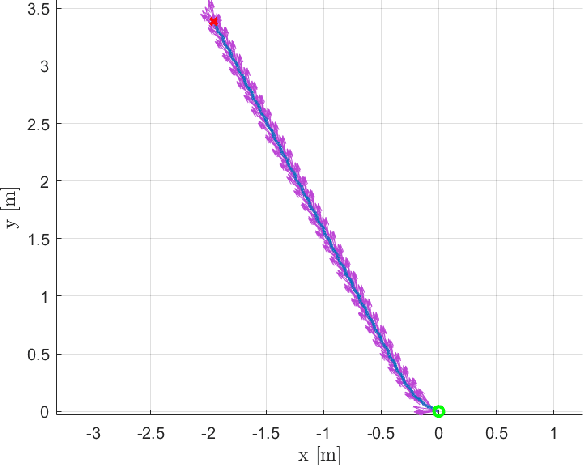
Nov 29, 2022The Modboat is a low-cost, underactuated, modular robot capable of surface swimming, docking to other modules, and undocking from them using only a single motor and two passive flippers. Undocking is achieved by causing intentional self-collision between the tails of neighboring modules in certain configurations; this becomes a challenge, however, when collective swimming as one connected component is desirable. Prior work has developed controllers that turn arbitrary configurations of docked Modboats into steerable vehicles, but they cannot counteract lateral forces and disturbances. In this work we present a centralized control strategy to create holonomic vehicles out of arbitrary configurations of docked Modboats using an iterative potential-field based search. We experimentally demonstrate that our controller performs well and can control surge and sway velocities and yaw angle simultaneously.
Collective Control for Arbitrary Configurations of Docked Modboats
Sep 08, 2022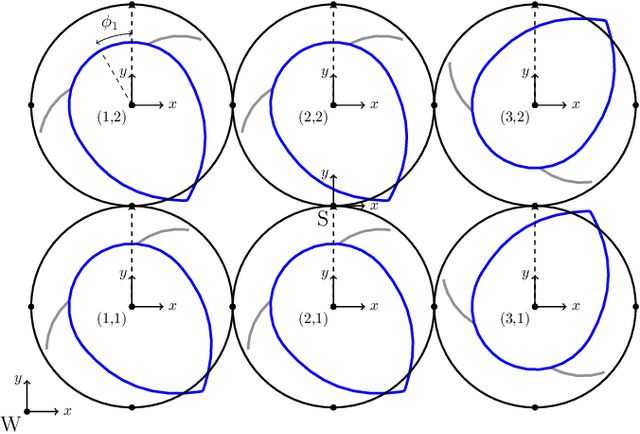
The Modboat is a low-cost, underactuated, modular robot capable of surface swimming, docking to other modules, and undocking from them using only a single motor and two passive flippers. Undocking is achieved by causing intentional self-collision between the tails of neighboring modules in certain configurations; this becomes a challenge, however, when collective swimming as one connected component is desirable. In this work, we develop a centralized control strategy to allow \textit{arbitrary} configurations of Modboats to swim as a single steerable vehicle and guarantee no accidental undocking. We also present a simplified model for hydrodynamic interactions between boats in a configuration that is tractable for real-time control. We experimentally demonstrate that our controller performs well, is consistent for configurations of various sizes and shapes, and can control both surge velocity and yaw angle simultaneously. Controllability is maintained while swimming, but pure yaw control causes lateral movement that cannot be counteracted by the presented framework.
Flow-Based Control of Marine Robots in Gyre-Like Environments
Mar 01, 2022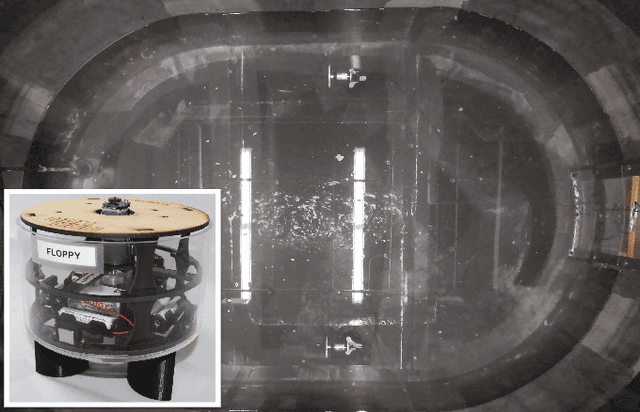
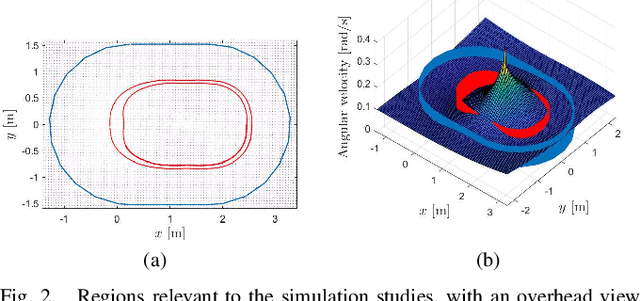
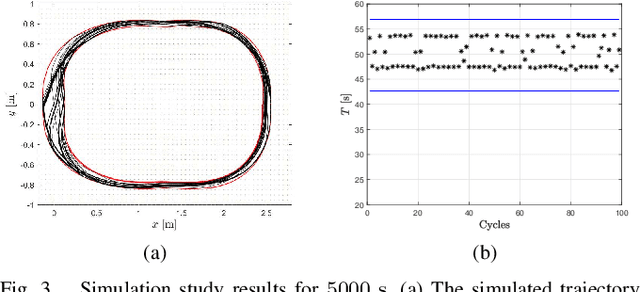
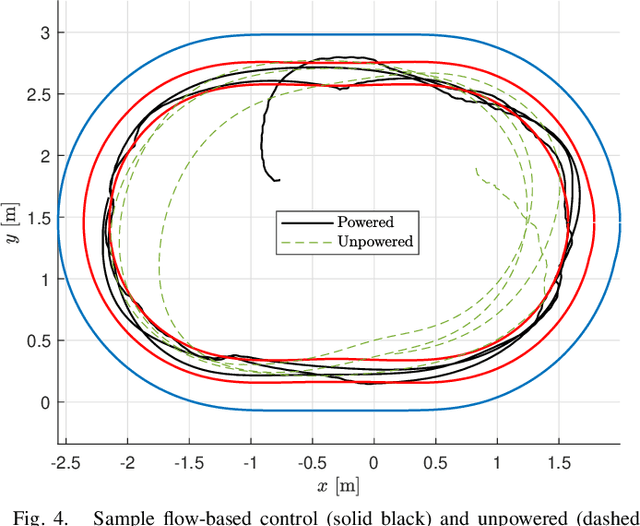
We present a flow-based control strategy that enables resource-constrained marine robots to patrol gyre-like flow environments on an orbital trajectory with a periodicity in a given range. The controller does not require a detailed model of the flow field and relies only on the robot's location relative to the center of the gyre. Instead of precisely tracking a pre-defined trajectory, the robots are tasked to stay in between two bounding trajectories with known periodicity. Furthermore, the proposed strategy leverages the surrounding flow field to minimize control effort. We prove that the proposed strategy enables robots to cycle in the flow satisfying the desired periodicity requirements. Our method is tested and validated both in simulation and in experiments using a low-cost, underactuated, surface swimming robot, i.e. the Modboat.
Amplitude Control for Parallel Lattices of Docked Modboats
Mar 01, 2022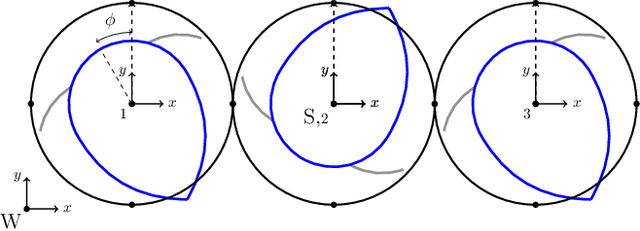


The Modboat is a low-cost, underactuated, modular robot capable of surface swimming. It is able to swim individually, dock to other Modboats, and undock from them using only a single motor and two passive flippers. Undocking without additional actuation is achieved by causing intentional self-collision between the tails of neighboring modules; this becomes a challenge when group swimming as one connected component is desirable. In this work, we develop a control strategy to allow parallel lattices of Modboats to swim as a single unit, which conventionally requires holonomic modules. We show that the control strategy is guaranteed to avoid unintentional undocking and minimizes internal forces within the lattice. Experimental verification shows that the controller performs well and is consistent for lattices of various sizes. Controllability is maintained while swimming, but pure yaw control causes lateral movement that cannot be counteracted by the presented framework.
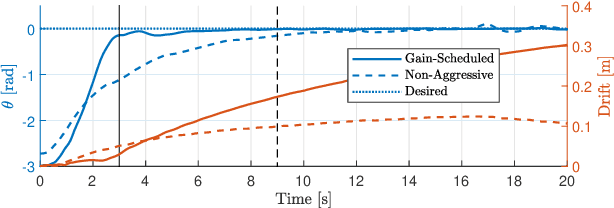
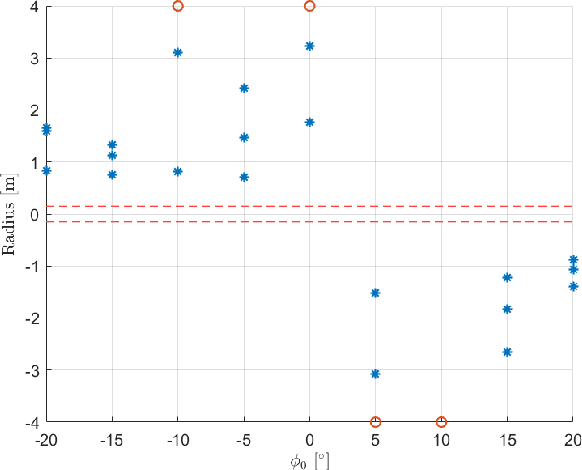
Thrust Direction Control of an Underactuated Oscillating Swimming Robot
Jul 27, 2021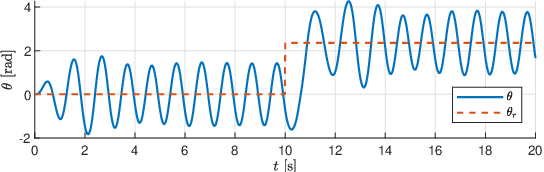
The Modboat is an autonomous surface robot that turns the oscillation of a single motor into a controlled paddling motion through passive flippers. Inertial control methods developed in prior work can successfully drive the Modboat along trajectories and enable docking to neighboring modules, but have a non-constant cycle time and cannot react to dynamic environments. In this work we present a thrust direction control method for the Modboat that significantly improves the time-response of the system and increases the accuracy with which it can be controlled. We experimentally demonstrate that this method can be used to perform more compact maneuvers than prior methods or comparable robots can. We also present an extension to the controller that solves the reaction wheel problem of unbounded actuator velocity, and show that it further improves performance.
Docking and Undocking a Modular Underactuated Oscillating Swimming Robot
Feb 25, 2021
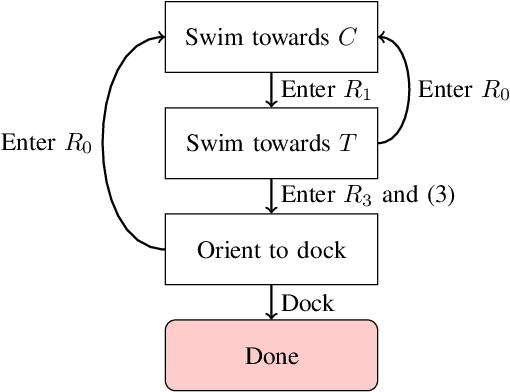
We describe a docking mechanism and strategy to allow modular self-assembly for the Modboat: an inexpensive underactuated oscillating swimming robot powered by a single motor. Because propulsion is achieved through oscillation, orientation can be controlled only in the average; this complicates docking, which requires precise position and orientation control. Given these challenges, we present a docking strategy and a motion primitive for controlling orientation, and show that this strategy allows successful docking in multiple configurations. Moreover, we demonstrate that the Modboat is also capable of undocking and changing its dock configuration, all without any additional actuation. This is unique among similar modular robotic systems.
Design and Experiments with a Low-Cost Single-Motor Modular Aquatic Robot
Feb 05, 2020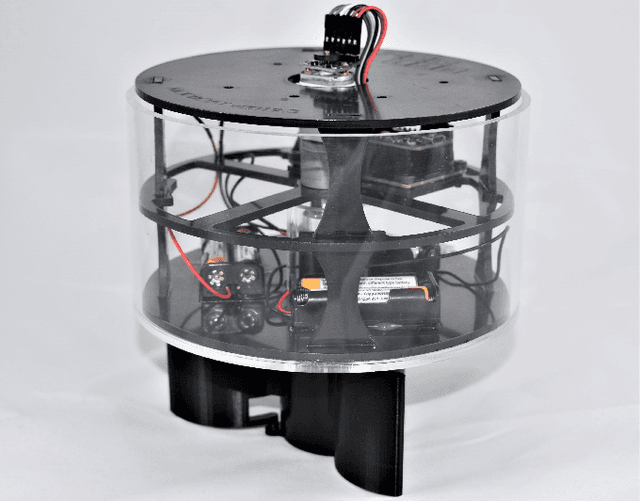
We present a novel design for a low-cost robotic boat powered by a single actuator, useful for both modular and swarming applications. The boat uses the conservation of angular momentum and passive flippers to convert the motion of a single motor into an adjustable paddling motion for propulsion and steering. We develop design criteria for modularity and swarming and present a prototype implementing these criteria. We identify significant mechanical sensitivities with the presented design, theorize about the cause of the sensitivities, and present an improved design for future work.