Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Experiments with a Low-Cost Single-Motor Modular Aquatic Robot
Paper and Code
Feb 05, 2020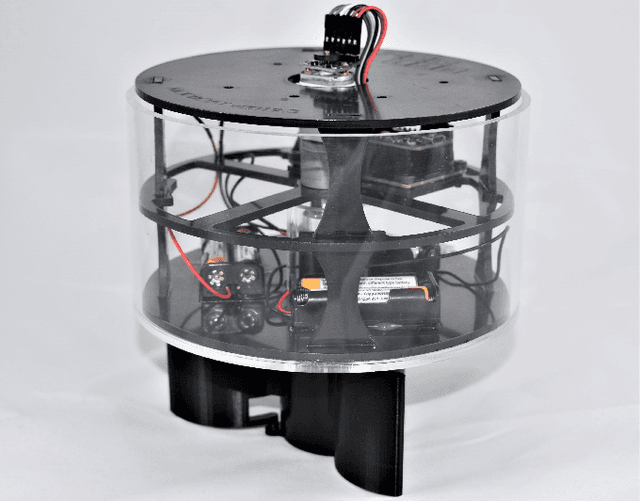
We present a novel design for a low-cost robotic boat powered by a single actuator, useful for both modular and swarming applications. The boat uses the conservation of angular momentum and passive flippers to convert the motion of a single motor into an adjustable paddling motion for propulsion and steering. We develop design criteria for modularity and swarming and present a prototype implementing these criteria. We identify significant mechanical sensitivities with the presented design, theorize about the cause of the sensitivities, and present an improved design for future work.
* Submitted to the International Conference on Ubiquitous Robots (UR
2020). 8 pages
View paper on