 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Navigation Functions for Zero-Shot Generalizable Motion Planning
Jun 02, 2026We introduce Neural Navigation Functions (Neural-NF), a learned reactive navigation function capable of zero-shot transfer across unseen environment geometries. Neural-NF places data-driven adaptation within a structured elliptic planner, where the navigation objective is learned while planner structure is preserved by construction. Specifically, intrinsic Laplacian-derived features are mapped to local PDE coefficients, and solving the resulting boundary value problem produces a globally consistent value function on each target domain. For every admissible learned model, the resulting policy is collision-free, provides monotonic descent and a global minimum at the goal by construction. This admits a linearly-solvable optimal-control interpretation for any parameter setting. Empirically, Neural-NF achieves strong zero-shot transfer across diverse geometries and outperforms learned planners that directly predict the value function by up to a $5\times$ improvement.
Structure-Preserving Learning Improves Geometry Generalization in Neural PDEs
Feb 02, 2026We aim to develop physics foundation models for science and engineering that provide real-time solutions to Partial Differential Equations (PDEs) which preserve structure and accuracy under adaptation to unseen geometries. To this end, we introduce General-Geometry Neural Whitney Forms (Geo-NeW): a data-driven finite element method. We jointly learn a differential operator and compatible reduced finite element spaces defined on the underlying geometry. The resulting model is solved to generate predictions, while exactly preserving physical conservation laws through Finite Element Exterior Calculus. Geometry enters the model as a discretized mesh both through a transformer-based encoding and as the basis for the learned finite element spaces. This explicitly connects the underlying geometry and imposed boundary conditions to the solution, providing a powerful inductive bias for learning neural PDEs, which we demonstrate improves generalization to unseen domains. We provide a novel parameterization of the constitutive model ensuring the existence and uniqueness of the solution. Our approach demonstrates state-of-the-art performance on several steady-state PDE benchmarks, and provides a significant improvement over conventional baselines on out-of-distribution geometries.
Multi-robot Multi-source Localization in Complex Flows with Physics-Preserving Environment Models
Sep 17, 2025Source localization in a complex flow poses a significant challenge for multi-robot teams tasked with localizing the source of chemical leaks or tracking the dispersion of an oil spill. The flow dynamics can be time-varying and chaotic, resulting in sporadic and intermittent sensor readings, and complex environmental geometries further complicate a team's ability to model and predict the dispersion. To accurately account for the physical processes that drive the dispersion dynamics, robots must have access to computationally intensive numerical models, which can be difficult when onboard computation is limited. We present a distributed mobile sensing framework for source localization in which each robot carries a machine-learned, finite element model of its environment to guide information-based sampling. The models are used to evaluate an approximate mutual information criterion to drive an infotaxis control strategy, which selects sensing regions that are expected to maximize informativeness for the source localization objective. Our approach achieves faster error reduction compared to baseline sensing strategies and results in more accurate source localization compared to baseline machine learning approaches.
KoopMotion: Learning Almost Divergence Free Koopman Flow Fields for Motion Planning
Sep 11, 2025In this work, we propose a novel flow field-based motion planning method that drives a robot from any initial state to a desired reference trajectory such that it converges to the trajectory's end point. Despite demonstrated efficacy in using Koopman operator theory for modeling dynamical systems, Koopman does not inherently enforce convergence to desired trajectories nor to specified goals -- a requirement when learning from demonstrations (LfD). We present KoopMotion which represents motion flow fields as dynamical systems, parameterized by Koopman Operators to mimic desired trajectories, and leverages the divergence properties of the learnt flow fields to obtain smooth motion fields that converge to a desired reference trajectory when a robot is placed away from the desired trajectory, and tracks the trajectory until the end point. To demonstrate the effectiveness of our approach, we show evaluations of KoopMotion on the LASA human handwriting dataset and a 3D manipulator end-effector trajectory dataset, including spectral analysis. We also perform experiments on a physical robot, verifying KoopMotion on a miniature autonomous surface vehicle operating in a non-static fluid flow environment. Our approach is highly sample efficient in both space and time, requiring only 3\% of the LASA dataset to generate dense motion plans. Additionally, KoopMotion provides a significant improvement over baselines when comparing metrics that measure spatial and temporal dynamics modeling efficacy.
Air-Ground Collaboration for Language-Specified Missions in Unknown Environments
May 14, 2025As autonomous robotic systems become increasingly mature, users will want to specify missions at the level of intent rather than in low-level detail. Language is an expressive and intuitive medium for such mission specification. However, realizing language-guided robotic teams requires overcoming significant technical hurdles. Interpreting and realizing language-specified missions requires advanced semantic reasoning. Successful heterogeneous robots must effectively coordinate actions and share information across varying viewpoints. Additionally, communication between robots is typically intermittent, necessitating robust strategies that leverage communication opportunities to maintain coordination and achieve mission objectives. In this work, we present a first-of-its-kind system where an unmanned aerial vehicle (UAV) and an unmanned ground vehicle (UGV) are able to collaboratively accomplish missions specified in natural language while reacting to changes in specification on the fly. We leverage a Large Language Model (LLM)-enabled planner to reason over semantic-metric maps that are built online and opportunistically shared between an aerial and a ground robot. We consider task-driven navigation in urban and rural areas. Our system must infer mission-relevant semantics and actively acquire information via semantic mapping. In both ground and air-ground teaming experiments, we demonstrate our system on seven different natural-language specifications at up to kilometer-scale navigation.
Deploying Foundation Model-Enabled Air and Ground Robots in the Field: Challenges and Opportunities
May 14, 2025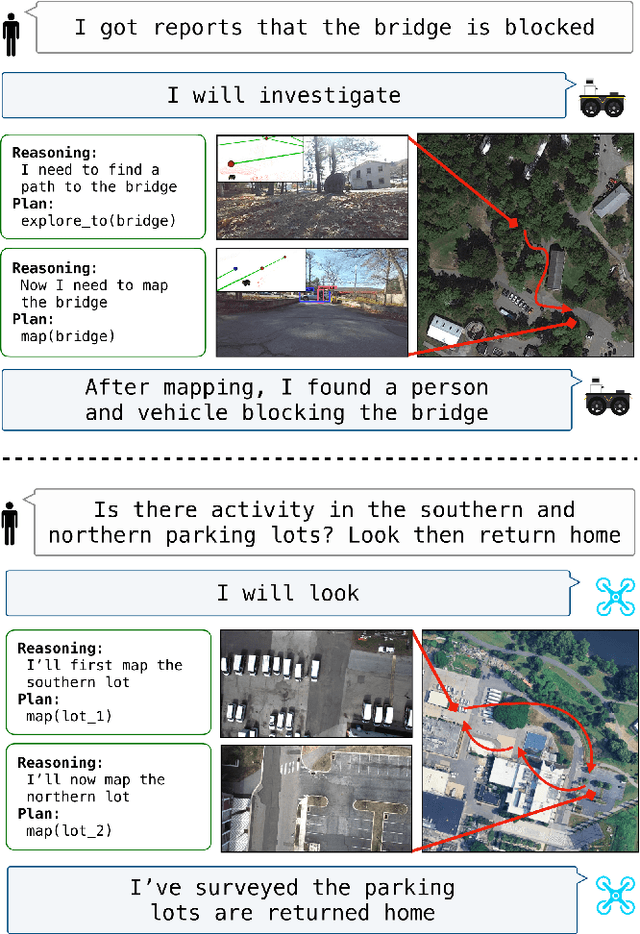
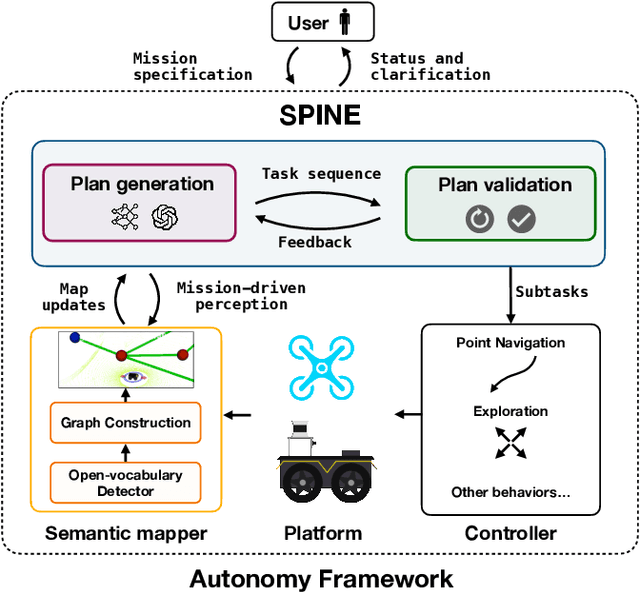
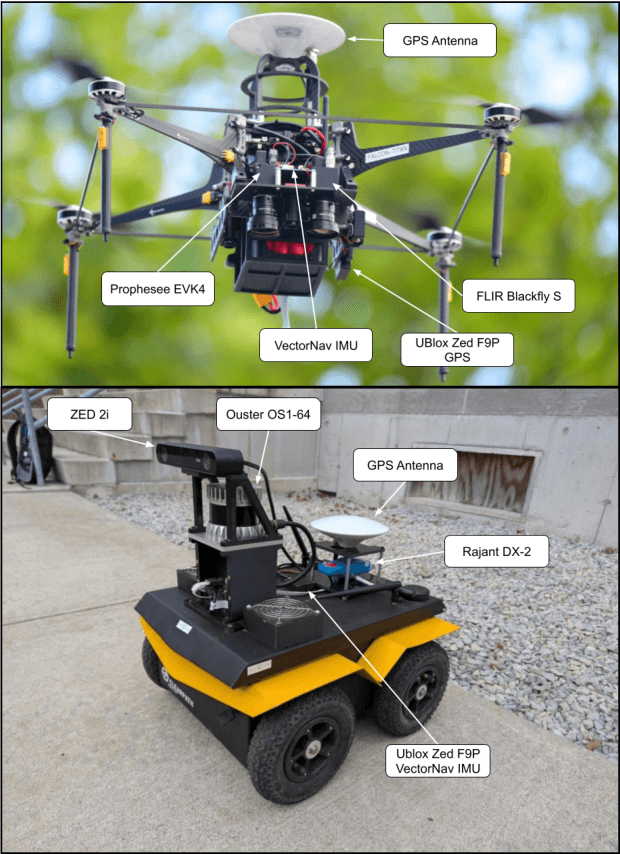
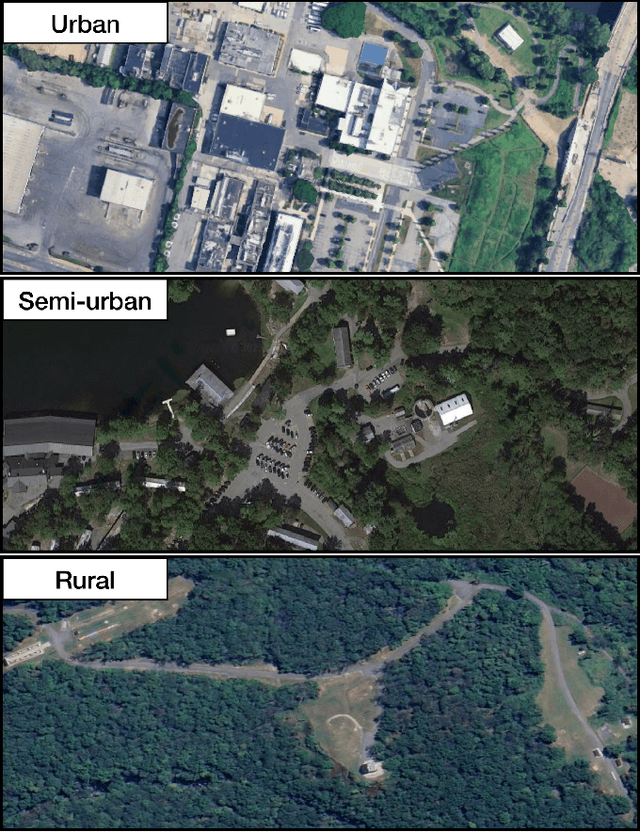
The integration of foundation models (FMs) into robotics has enabled robots to understand natural language and reason about the semantics in their environments. However, existing FM-enabled robots primary operate in closed-world settings, where the robot is given a full prior map or has a full view of its workspace. This paper addresses the deployment of FM-enabled robots in the field, where missions often require a robot to operate in large-scale and unstructured environments. To effectively accomplish these missions, robots must actively explore their environments, navigate obstacle-cluttered terrain, handle unexpected sensor inputs, and operate with compute constraints. We discuss recent deployments of SPINE, our LLM-enabled autonomy framework, in field robotic settings. To the best of our knowledge, we present the first demonstration of large-scale LLM-enabled robot planning in unstructured environments with several kilometers of missions. SPINE is agnostic to a particular LLM, which allows us to distill small language models capable of running onboard size, weight and power (SWaP) limited platforms. Via preliminary model distillation work, we then present the first language-driven UAV planner using on-device language models. We conclude our paper by proposing several promising directions for future research.
EnKode: Active Learning of Unknown Flows with Koopman Operators
Oct 22, 2024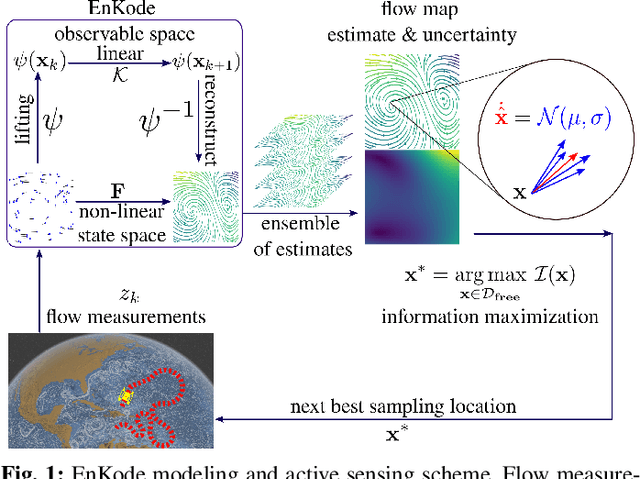
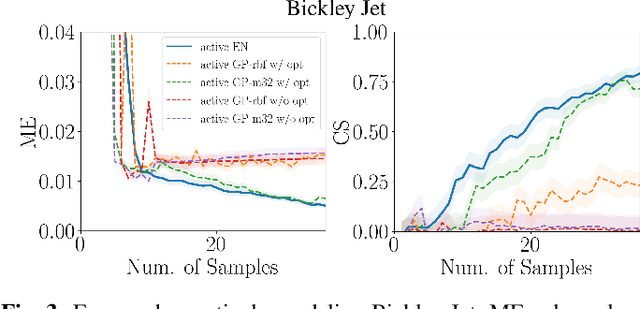
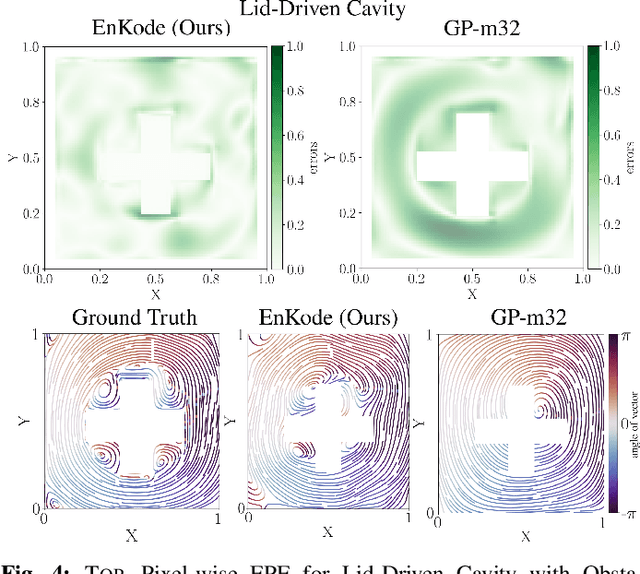
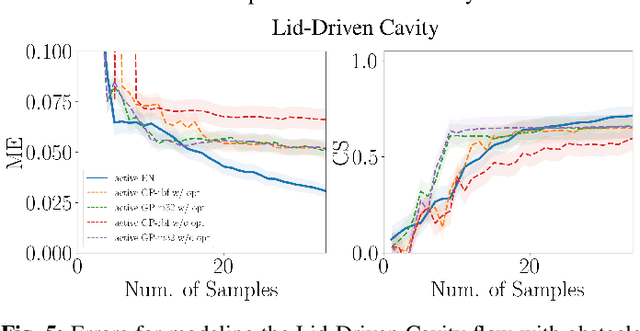
In this letter, we address the task of adaptive sampling to model vector fields. When modeling environmental phenomena with a robot, gathering high resolution information can be resource intensive. Actively gathering data and modeling flows with the data is a more efficient alternative. However, in such scenarios, data is often sparse and thus requires flow modeling techniques that are effective at capturing the relevant dynamical features of the flow to ensure high prediction accuracy of the resulting models. To accomplish this effectively, regions with high informative value must be identified. We propose EnKode, an active sampling approach based on Koopman Operator theory and ensemble methods that can build high quality flow models and effectively estimate model uncertainty. For modeling complex flows, EnKode provides comparable or better estimates of unsampled flow regions than Gaussian Process Regression models with hyperparameter optimization. Additionally, our active sensing scheme provides more accurate flow estimates than comparable strategies that rely on uniform sampling. We evaluate EnKode using three common benchmarking systems: the Bickley Jet, Lid-Driven Cavity flow with an obstacle, and real ocean currents from the National Oceanic and Atmospheric Administration (NOAA).
Flying Quadrotors in Tight Formations using Learning-based Model Predictive Control
Oct 13, 2024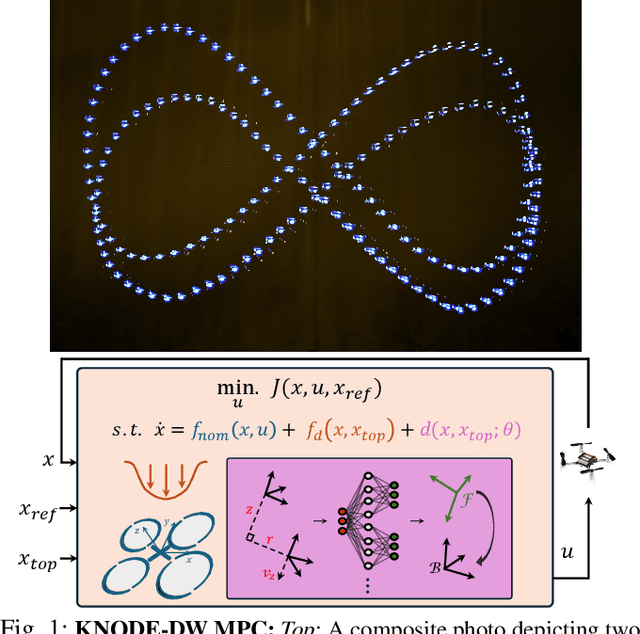
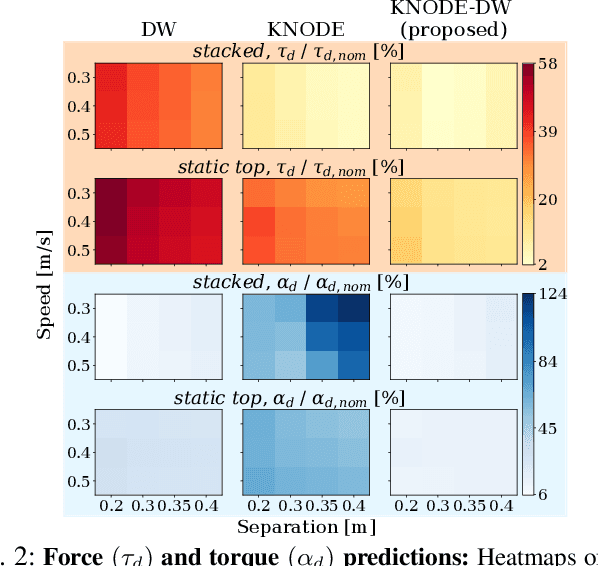
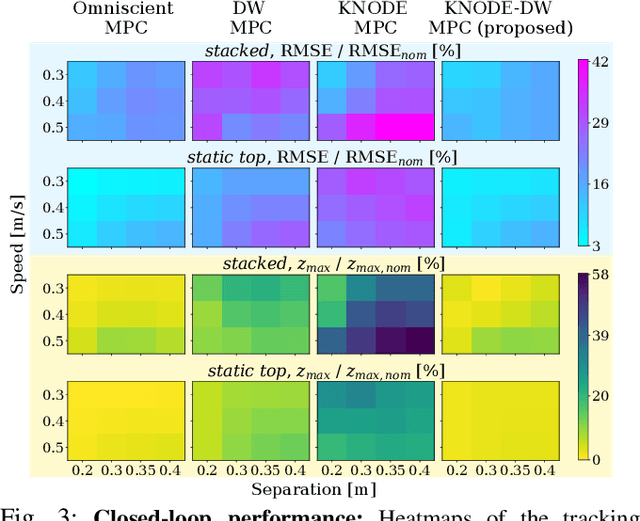
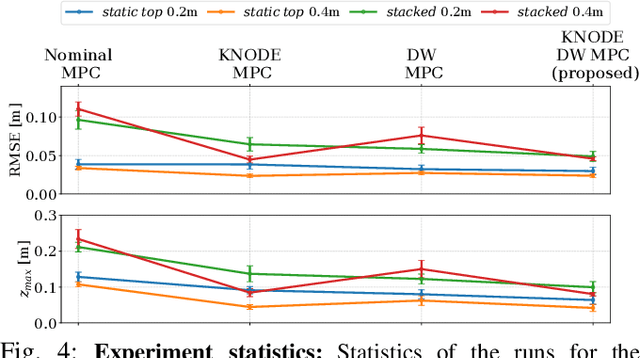
Flying quadrotors in tight formations is a challenging problem. It is known that in the near-field airflow of a quadrotor, the aerodynamic effects induced by the propellers are complex and difficult to characterize. Although machine learning tools can potentially be used to derive models that capture these effects, these data-driven approaches can be sample inefficient and the resulting models often do not generalize as well as their first-principles counterparts. In this work, we propose a framework that combines the benefits of first-principles modeling and data-driven approaches to construct an accurate and sample efficient representation of the complex aerodynamic effects resulting from quadrotors flying in formation. The data-driven component within our model is lightweight, making it amenable for optimization-based control design. Through simulations and physical experiments, we show that incorporating the model into a novel learning-based nonlinear model predictive control (MPC) framework results in substantial performance improvements in terms of trajectory tracking and disturbance rejection. In particular, our framework significantly outperforms nominal MPC in physical experiments, achieving a 40.1% improvement in the average trajectory tracking errors and a 57.5% reduction in the maximum vertical separation errors. Our framework also achieves exceptional sample efficiency, using only a total of 46 seconds of flight data for training across both simulations and physical experiments. Furthermore, with our proposed framework, the quadrotors achieve an exceptionally tight formation, flying with an average separation of less than 1.5 body lengths throughout the flight. A video illustrating our framework and physical experiments is given here: https://youtu.be/Hv-0JiVoJGo
EvMAPPER: High Altitude Orthomapping with Event Cameras
Sep 26, 2024



Traditionally, unmanned aerial vehicles (UAVs) rely on CMOS-based cameras to collect images about the world below. One of the most successful applications of UAVs is to generate orthomosaics or orthomaps, in which a series of images are integrated together to develop a larger map. However, the use of CMOS-based cameras with global or rolling shutters mean that orthomaps are vulnerable to challenging light conditions, motion blur, and high-speed motion of independently moving objects under the camera. Event cameras are less sensitive to these issues, as their pixels are able to trigger asynchronously on brightness changes. This work introduces the first orthomosaic approach using event cameras. In contrast to existing methods relying only on CMOS cameras, our approach enables map generation even in challenging light conditions, including direct sunlight and after sunset.
Collision-free time-optimal path parameterization for multi-robot teams
Sep 25, 2024



Coordinating the motion of multiple robots in cluttered environments remains a computationally challenging task. We study the problem of minimizing the execution time of a set of geometric paths by a team of robots with state-dependent actuation constraints. We propose a Time-Optimal Path Parameterization (TOPP) algorithm for multiple car-like agents, where the modulation of the timing of every robot along its assigned path is employed to ensure collision avoidance and dynamic feasibility. This is achieved through the use of a priority queue to determine the order of trajectory execution for each robot while taking into account all possible collisions with higher priority robots in a spatiotemporal graph. We show a 10-20% reduction in makespan against existing state-of-the-art methods and validate our approach through simulations and hardware experiments.