 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnKode: Active Learning of Unknown Flows with Koopman Operators
Oct 22, 2024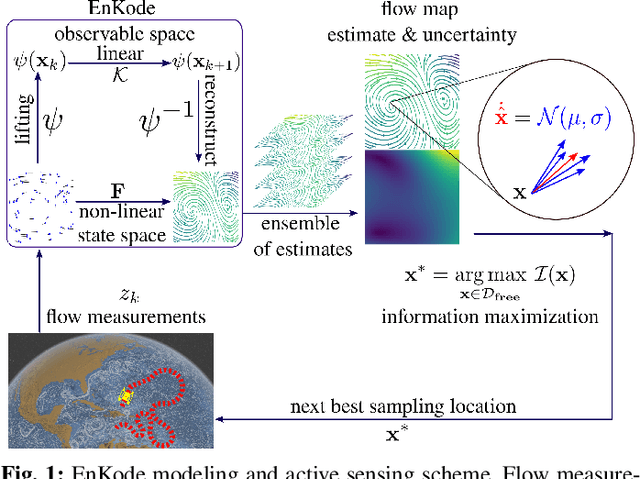
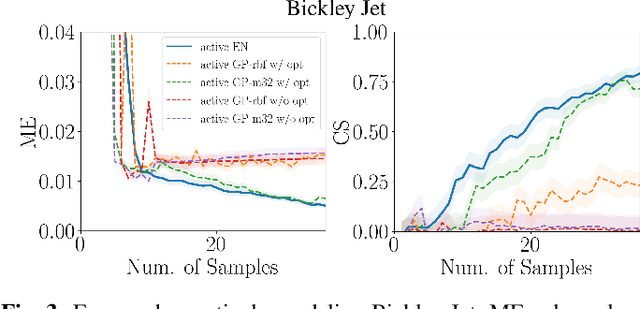
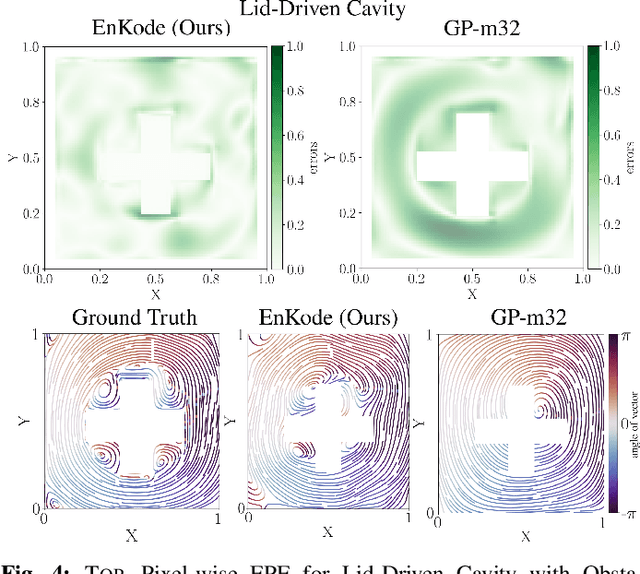
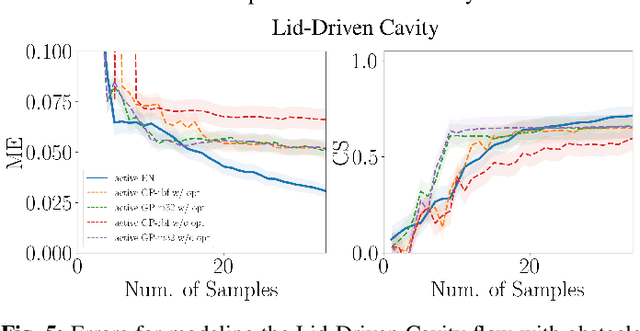
In this letter, we address the task of adaptive sampling to model vector fields. When modeling environmental phenomena with a robot, gathering high resolution information can be resource intensive. Actively gathering data and modeling flows with the data is a more efficient alternative. However, in such scenarios, data is often sparse and thus requires flow modeling techniques that are effective at capturing the relevant dynamical features of the flow to ensure high prediction accuracy of the resulting models. To accomplish this effectively, regions with high informative value must be identified. We propose EnKode, an active sampling approach based on Koopman Operator theory and ensemble methods that can build high quality flow models and effectively estimate model uncertainty. For modeling complex flows, EnKode provides comparable or better estimates of unsampled flow regions than Gaussian Process Regression models with hyperparameter optimization. Additionally, our active sensing scheme provides more accurate flow estimates than comparable strategies that rely on uniform sampling. We evaluate EnKode using three common benchmarking systems: the Bickley Jet, Lid-Driven Cavity flow with an obstacle, and real ocean currents from the National Oceanic and Atmospheric Administration (NOAA).
Enhancing Sample Efficiency and Uncertainty Compensation in Learning-based Model Predictive Control for Aerial Robots
Aug 01, 2023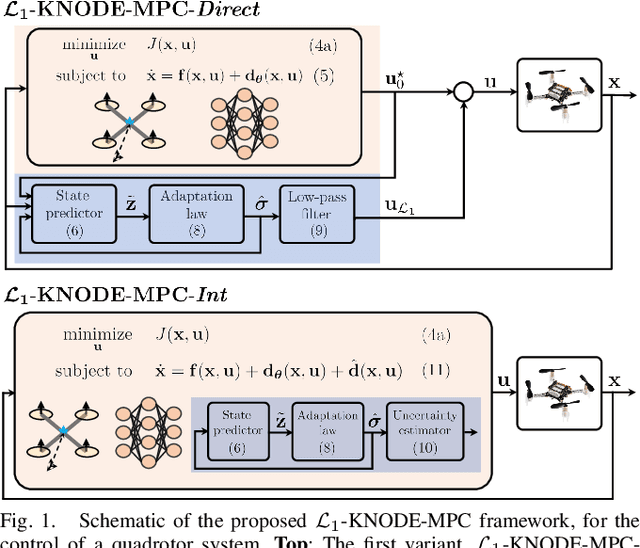



The recent increase in data availability and reliability has led to a surge in the development of learning-based model predictive control (MPC) frameworks for robot systems. Despite attaining substantial performance improvements over their non-learning counterparts, many of these frameworks rely on an offline learning procedure to synthesize a dynamics model. This implies that uncertainties encountered by the robot during deployment are not accounted for in the learning process. On the other hand, learning-based MPC methods that learn dynamics models online are computationally expensive and often require a significant amount of data. To alleviate these shortcomings, we propose a novel learning-enhanced MPC framework that incorporates components from $\mathcal{L}_1$ adaptive control into learning-based MPC. This integration enables the accurate compensation of both matched and unmatched uncertainties in a sample-efficient way, enhancing the control performance during deployment. In our proposed framework, we present two variants and apply them to the control of a quadrotor system. Through simulations and physical experiments, we demonstrate that the proposed framework not only allows the synthesis of an accurate dynamics model on-the-fly, but also significantly improves the closed-loop control performance under a wide range of spatio-temporal uncertainties.
Stochastic Nonlinear Ensemble Modeling and Control for Robot Team Environmental Monitoring
Dec 22, 2022We seek methods to model, control, and analyze robot teams performing environmental monitoring tasks. During environmental monitoring, the goal is to have teams of robots collect various data throughout a fixed region for extended periods of time. Standard bottom-up task assignment methods do not scale as the number of robots and task locations increases and require computationally expensive replanning. Alternatively, top-down methods have been used to combat computational complexity, but most have been limited to the analysis of methods which focus on transition times between tasks. In this work, we study a class of nonlinear macroscopic models which we use to control a time-varying distribution of robots performing different tasks throughout an environment. Our proposed ensemble model and control maintains desired time-varying populations of robots by leveraging naturally occurring interactions between robots performing tasks. We validate our approach at multiple fidelity levels including experimental results, suggesting the effectiveness of our approach to perform environmental monitoring.
Receding Horizon Control on the Broadcast of Information in Stochastic Networks
Dec 19, 2022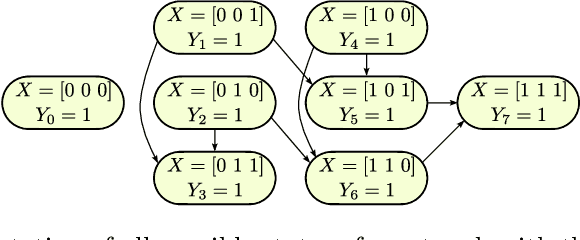
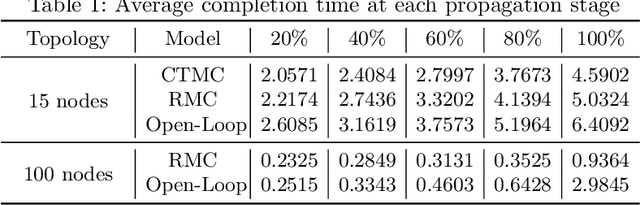
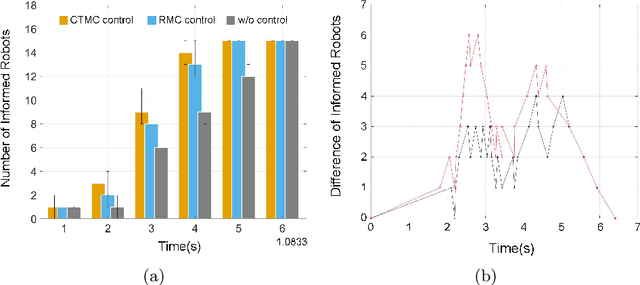
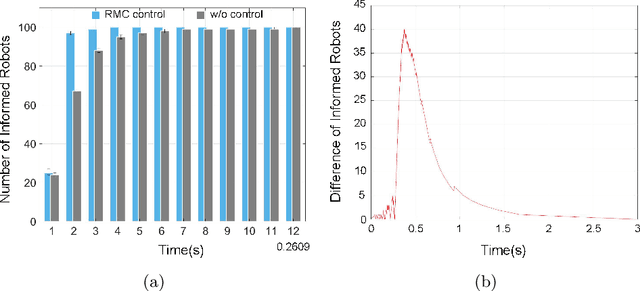
This paper focuses on the broadcast of information on robot networks with stochastic network interconnection topologies. Problematic communication networks are almost unavoidable in areas where we wish to deploy multi-robotic systems, usually due to a lack of environmental consistency, accessibility, and structure. We tackle this problem by modeling the broadcast of information in a multi-robot communication network as a stochastic process with random arrival times, which can be produced by irregular robot movements, wireless attenuation, and other environmental factors. Using this model, we provide and analyze a receding horizon control strategy to control the statistics of the information broadcast. The resulting strategy compels the robots to re-direct their communication resources to different neighbors according to the current propagation process to fulfill global broadcast requirements. Based on this method, we provide an approach to compute the expected time to broadcast the message to all nodes. Numerical examples are provided to illustrate the results.
Proportional Control for Stochastic Regulation on Allocation of Multi-Robots
Dec 19, 2022



Any strategy used to distribute a robot ensemble over a set of sequential tasks is subject to inaccuracy due to robot-level uncertainties and environmental influences on the robots' behavior. We approach the problem of inaccuracy during task allocation by modeling and controlling the overall ensemble behavior. Our model represents the allocation problem as a stochastic jump process and we regulate the mean and variance of such a process. The main contributions of this paper are: Establishing a structure for the transition rates of the equivalent stochastic jump process and formally showing that this approach leads to decoupled parameters that allow us to adjust the first- and second-order moments of the ensemble distribution over tasks, which gives the flexibility to decrease the variance in the desired final distribution. This allows us to directly shape the impact of uncertainties on the group allocation over tasks. We introduce a detailed procedure to design the gains to achieve the desired mean and show how the additional parameters impact the covariance matrix, which is directly associated with the degree of task allocation precision. Our simulation and experimental results illustrate the successful control of several robot ensembles during task allocation.