 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-robot Multi-source Localization in Complex Flows with Physics-Preserving Environment Models
Sep 17, 2025Source localization in a complex flow poses a significant challenge for multi-robot teams tasked with localizing the source of chemical leaks or tracking the dispersion of an oil spill. The flow dynamics can be time-varying and chaotic, resulting in sporadic and intermittent sensor readings, and complex environmental geometries further complicate a team's ability to model and predict the dispersion. To accurately account for the physical processes that drive the dispersion dynamics, robots must have access to computationally intensive numerical models, which can be difficult when onboard computation is limited. We present a distributed mobile sensing framework for source localization in which each robot carries a machine-learned, finite element model of its environment to guide information-based sampling. The models are used to evaluate an approximate mutual information criterion to drive an infotaxis control strategy, which selects sensing regions that are expected to maximize informativeness for the source localization objective. Our approach achieves faster error reduction compared to baseline sensing strategies and results in more accurate source localization compared to baseline machine learning approaches.
KoopMotion: Learning Almost Divergence Free Koopman Flow Fields for Motion Planning
Sep 11, 2025In this work, we propose a novel flow field-based motion planning method that drives a robot from any initial state to a desired reference trajectory such that it converges to the trajectory's end point. Despite demonstrated efficacy in using Koopman operator theory for modeling dynamical systems, Koopman does not inherently enforce convergence to desired trajectories nor to specified goals -- a requirement when learning from demonstrations (LfD). We present KoopMotion which represents motion flow fields as dynamical systems, parameterized by Koopman Operators to mimic desired trajectories, and leverages the divergence properties of the learnt flow fields to obtain smooth motion fields that converge to a desired reference trajectory when a robot is placed away from the desired trajectory, and tracks the trajectory until the end point. To demonstrate the effectiveness of our approach, we show evaluations of KoopMotion on the LASA human handwriting dataset and a 3D manipulator end-effector trajectory dataset, including spectral analysis. We also perform experiments on a physical robot, verifying KoopMotion on a miniature autonomous surface vehicle operating in a non-static fluid flow environment. Our approach is highly sample efficient in both space and time, requiring only 3\% of the LASA dataset to generate dense motion plans. Additionally, KoopMotion provides a significant improvement over baselines when comparing metrics that measure spatial and temporal dynamics modeling efficacy.
Stochastic Nonlinear Ensemble Modeling and Control for Robot Team Environmental Monitoring
Dec 22, 2022We seek methods to model, control, and analyze robot teams performing environmental monitoring tasks. During environmental monitoring, the goal is to have teams of robots collect various data throughout a fixed region for extended periods of time. Standard bottom-up task assignment methods do not scale as the number of robots and task locations increases and require computationally expensive replanning. Alternatively, top-down methods have been used to combat computational complexity, but most have been limited to the analysis of methods which focus on transition times between tasks. In this work, we study a class of nonlinear macroscopic models which we use to control a time-varying distribution of robots performing different tasks throughout an environment. Our proposed ensemble model and control maintains desired time-varying populations of robots by leveraging naturally occurring interactions between robots performing tasks. We validate our approach at multiple fidelity levels including experimental results, suggesting the effectiveness of our approach to perform environmental monitoring.
Proportional Control for Stochastic Regulation on Allocation of Multi-Robots
Dec 19, 2022



Any strategy used to distribute a robot ensemble over a set of sequential tasks is subject to inaccuracy due to robot-level uncertainties and environmental influences on the robots' behavior. We approach the problem of inaccuracy during task allocation by modeling and controlling the overall ensemble behavior. Our model represents the allocation problem as a stochastic jump process and we regulate the mean and variance of such a process. The main contributions of this paper are: Establishing a structure for the transition rates of the equivalent stochastic jump process and formally showing that this approach leads to decoupled parameters that allow us to adjust the first- and second-order moments of the ensemble distribution over tasks, which gives the flexibility to decrease the variance in the desired final distribution. This allows us to directly shape the impact of uncertainties on the group allocation over tasks. We introduce a detailed procedure to design the gains to achieve the desired mean and show how the additional parameters impact the covariance matrix, which is directly associated with the degree of task allocation precision. Our simulation and experimental results illustrate the successful control of several robot ensembles during task allocation.
Learning and Leveraging Environmental Features to Improve Robot Awareness
Sep 13, 2021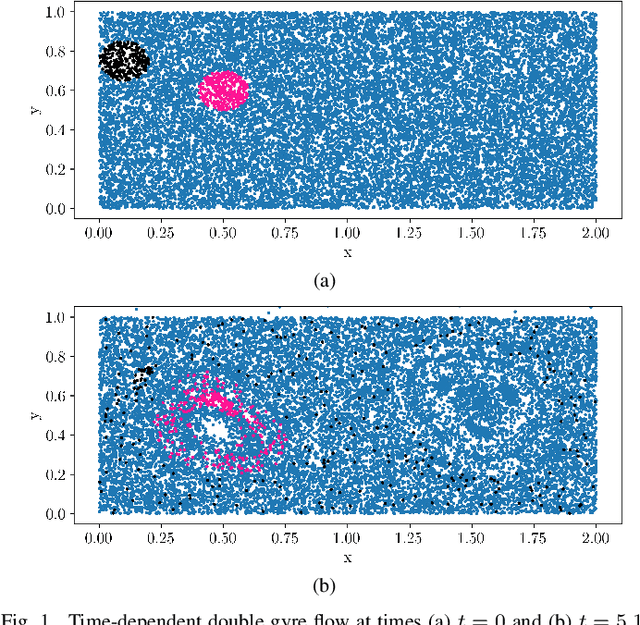
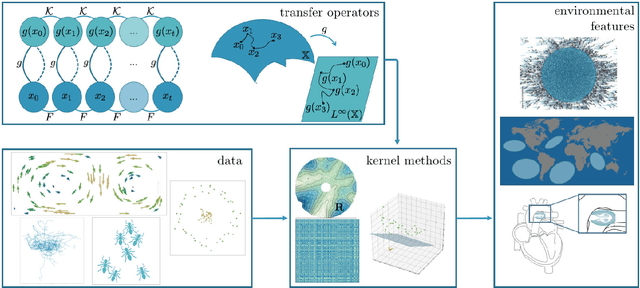
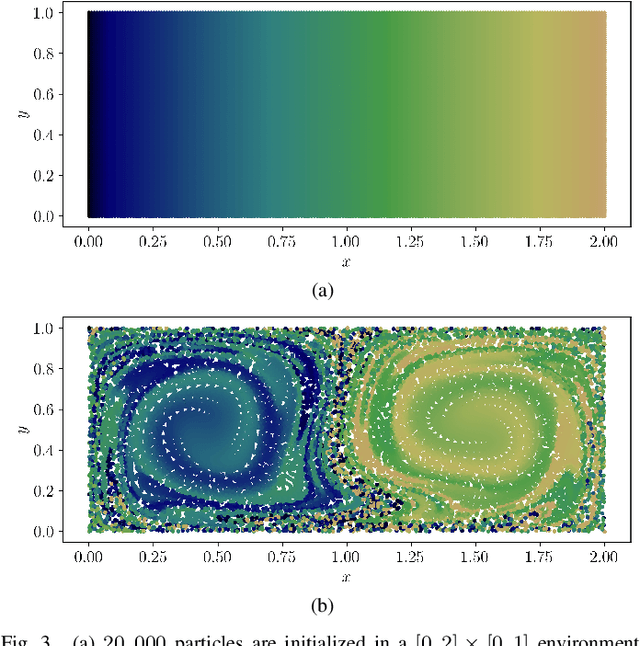
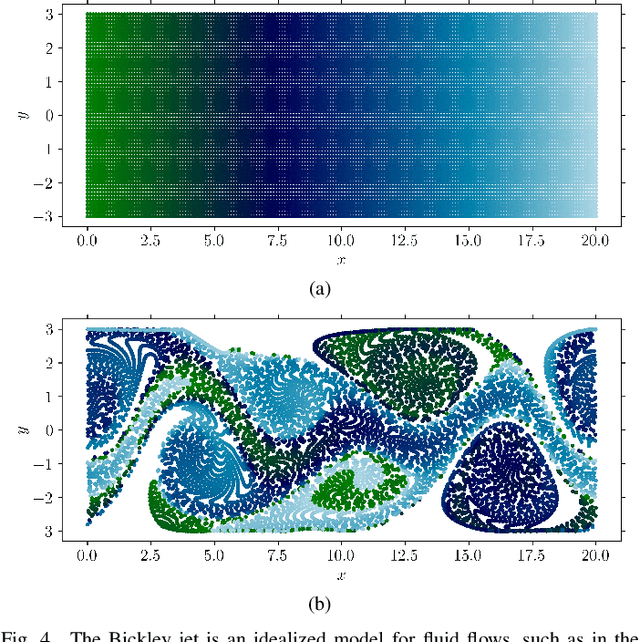
This paper studies how global dynamics can inform path planning and decision-making for robots. Specifically, we investigate how coherent sets, an environmental feature found in flow-like environments, informs robot awareness within these scenarios. We compute coherent sets online with techniques from machine learning, and design a framework for robot behavior that uses coherent sets. We demonstrate the effectiveness of online methods over offline methods. Notably, we apply these online methods for robot monitoring of urban environments and robot navigation through water. Environmental features such as coherent sets provide rich context to robots for smarter, more efficient behavior.
Establishing Reliable Robot Behavior using Capability Analysis Tables
Jul 23, 2020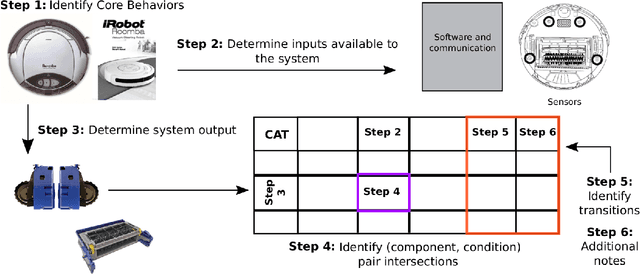

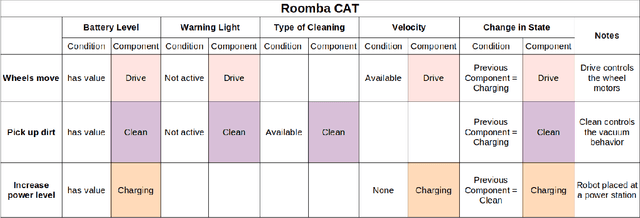
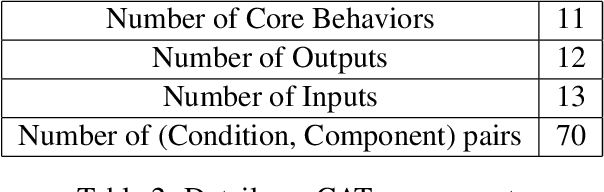
Robots are often so complex that one person may not know all the ins and outs of the system. Inheriting software and hardware infrastructure with limited documentation and/or practical robot experience presents a costly challenge for an engineer or researcher. The choice is to either re-build existing systems, or invest in learning the existing framework. No matter the choice, a reliable system which produces expected outcomes is necessary, and while rebuilding may at first appear easier than learning the system, future users will be faced with the same choice. This paper provides a method to allow for increased documentation of the robotic system, which in turn can be used to contribute in overall robot reliability. To do this we propose the identification of a robot's core behaviors for use in Capability Analysis Tables (CATs). CATs are a form of tabular documentation that connect the hardware and software inputs and outputs to the robot's core behaviors. Unlike existing methods, CATs are flexible, easy to build, and understandable by non-expert robot users. We demonstrate this documentation method with an experimental example using an Unmanned Aerial Vehicle (UAV).
* In Proceedings AREA 2020, arXiv:2007.11260