 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrand Challenges in the Verification of Autonomous Systems
Nov 21, 2024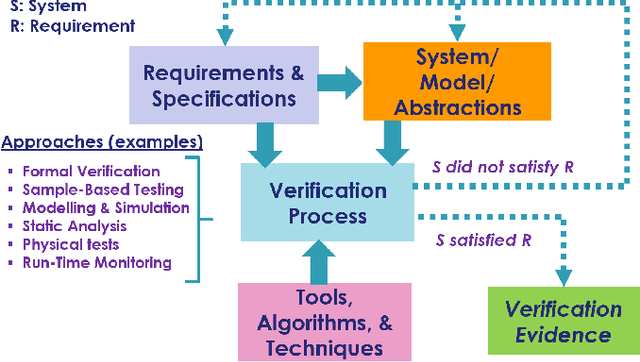
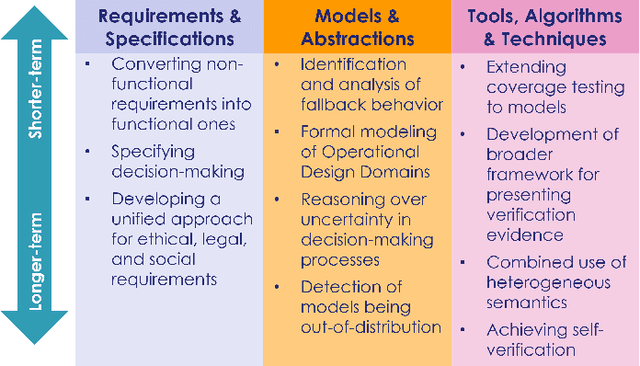
Autonomous systems use independent decision-making with only limited human intervention to accomplish goals in complex and unpredictable environments. As the autonomy technologies that underpin them continue to advance, these systems will find their way into an increasing number of applications in an ever wider range of settings. If we are to deploy them to perform safety-critical or mission-critical roles, it is imperative that we have justified confidence in their safe and correct operation. Verification is the process by which such confidence is established. However, autonomous systems pose challenges to existing verification practices. This paper highlights viewpoints of the Roadmap Working Group of the IEEE Robotics and Automation Society Technical Committee for Verification of Autonomous Systems, identifying these grand challenges, and providing a vision for future research efforts that will be needed to address them.
Establishing Reliable Robot Behavior using Capability Analysis Tables
Jul 23, 2020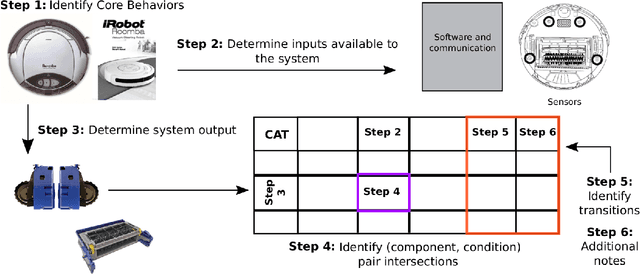

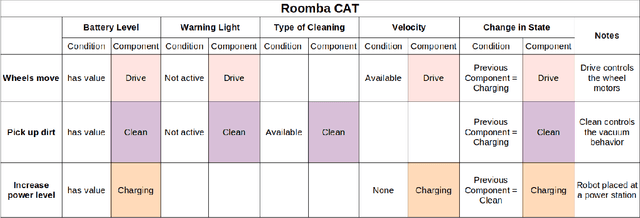
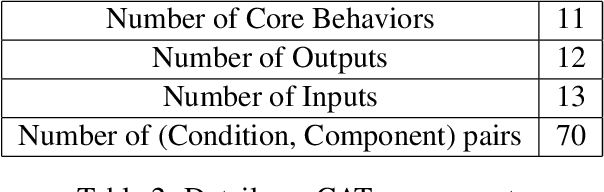
Robots are often so complex that one person may not know all the ins and outs of the system. Inheriting software and hardware infrastructure with limited documentation and/or practical robot experience presents a costly challenge for an engineer or researcher. The choice is to either re-build existing systems, or invest in learning the existing framework. No matter the choice, a reliable system which produces expected outcomes is necessary, and while rebuilding may at first appear easier than learning the system, future users will be faced with the same choice. This paper provides a method to allow for increased documentation of the robotic system, which in turn can be used to contribute in overall robot reliability. To do this we propose the identification of a robot's core behaviors for use in Capability Analysis Tables (CATs). CATs are a form of tabular documentation that connect the hardware and software inputs and outputs to the robot's core behaviors. Unlike existing methods, CATs are flexible, easy to build, and understandable by non-expert robot users. We demonstrate this documentation method with an experimental example using an Unmanned Aerial Vehicle (UAV).
* In Proceedings AREA 2020, arXiv:2007.11260