 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstablishing Reliable Robot Behavior using Capability Analysis Tables
Jul 23, 2020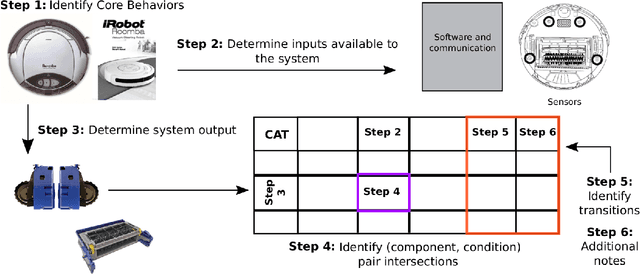

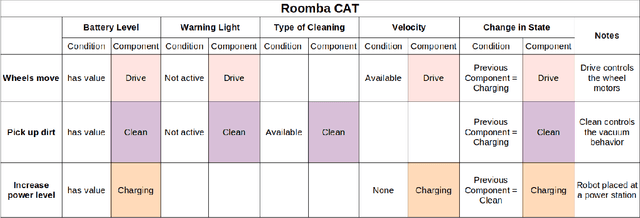
Robots are often so complex that one person may not know all the ins and outs of the system. Inheriting software and hardware infrastructure with limited documentation and/or practical robot experience presents a costly challenge for an engineer or researcher. The choice is to either re-build existing systems, or invest in learning the existing framework. No matter the choice, a reliable system which produces expected outcomes is necessary, and while rebuilding may at first appear easier than learning the system, future users will be faced with the same choice. This paper provides a method to allow for increased documentation of the robotic system, which in turn can be used to contribute in overall robot reliability. To do this we propose the identification of a robot's core behaviors for use in Capability Analysis Tables (CATs). CATs are a form of tabular documentation that connect the hardware and software inputs and outputs to the robot's core behaviors. Unlike existing methods, CATs are flexible, easy to build, and understandable by non-expert robot users. We demonstrate this documentation method with an experimental example using an Unmanned Aerial Vehicle (UAV).
* In Proceedings AREA 2020, arXiv:2007.11260