 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Continuous Assurance with Formal Verification and Assurance Cases
Nov 17, 2025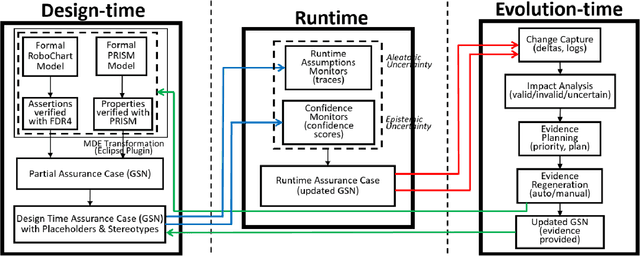
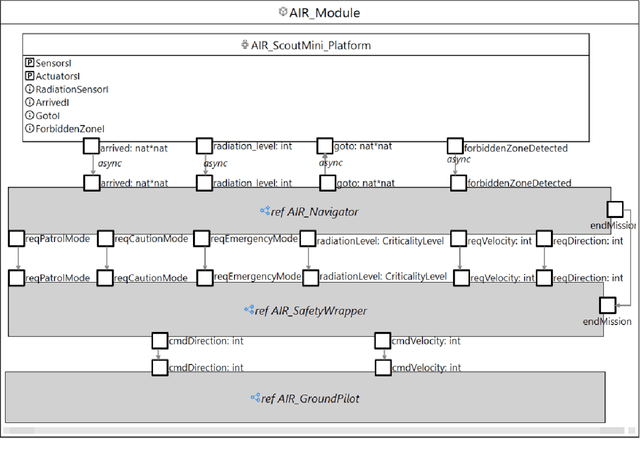
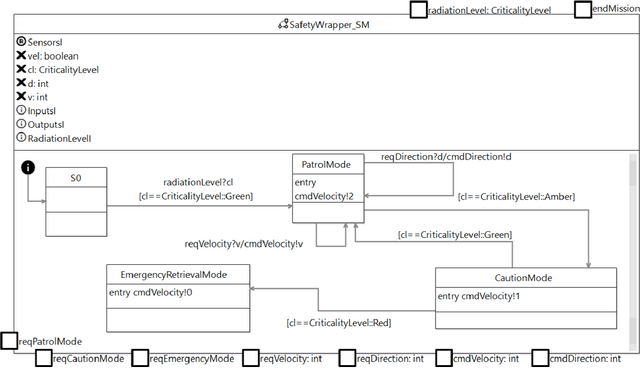
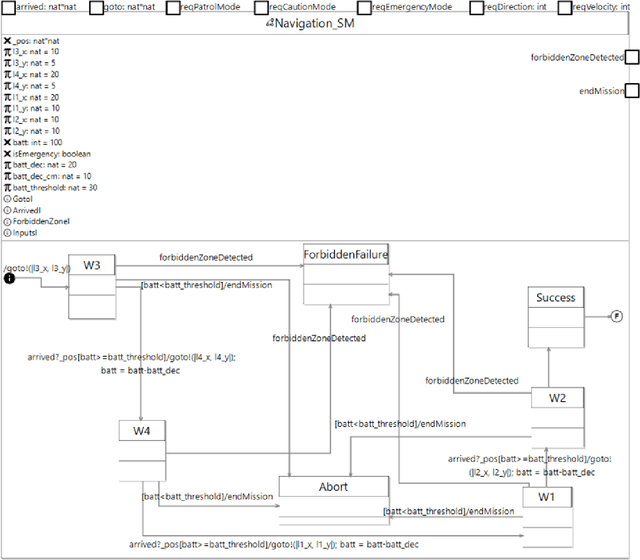
Autonomous systems must sustain justified confidence in their correctness and safety across their operational lifecycle-from design and deployment through post-deployment evolution. Traditional assurance methods often separate development-time assurance from runtime assurance, yielding fragmented arguments that cannot adapt to runtime changes or system updates - a significant challenge for assured autonomy. Towards addressing this, we propose a unified Continuous Assurance Framework that integrates design-time, runtime, and evolution-time assurance within a traceable, model-driven workflow as a step towards assured autonomy. In this paper, we specifically instantiate the design-time phase of the framework using two formal verification methods: RoboChart for functional correctness and PRISM for probabilistic risk analysis. We also propose a model-driven transformation pipeline, implemented as an Eclipse plugin, that automatically regenerates structured assurance arguments whenever formal specifications or their verification results change, thereby ensuring traceability. We demonstrate our approach on a nuclear inspection robot scenario, and discuss its alignment with the Trilateral AI Principles, reflecting regulator-endorsed best practices.
Autonomy and Safety Assurance in the Early Development of Robotics and Autonomous Systems
Jan 30, 2025
This report provides an overview of the workshop titled Autonomy and Safety Assurance in the Early Development of Robotics and Autonomous Systems, hosted by the Centre for Robotic Autonomy in Demanding and Long-Lasting Environments (CRADLE) on September 2, 2024, at The University of Manchester, UK. The event brought together representatives from six regulatory and assurance bodies across diverse sectors to discuss challenges and evidence for ensuring the safety of autonomous and robotic systems, particularly autonomous inspection robots (AIR). The workshop featured six invited talks by the regulatory and assurance bodies. CRADLE aims to make assurance an integral part of engineering reliable, transparent, and trustworthy autonomous systems. Key discussions revolved around three research questions: (i) challenges in assuring safety for AIR; (ii) evidence for safety assurance; and (iii) how assurance cases need to differ for autonomous systems. Following the invited talks, the breakout groups further discussed the research questions using case studies from ground (rail), nuclear, underwater, and drone-based AIR. This workshop offered a valuable opportunity for representatives from industry, academia, and regulatory bodies to discuss challenges related to assured autonomy. Feedback from participants indicated a strong willingness to adopt a design-for-assurance process to ensure that robots are developed and verified to meet regulatory expectations.
Grand Challenges in the Verification of Autonomous Systems
Nov 21, 2024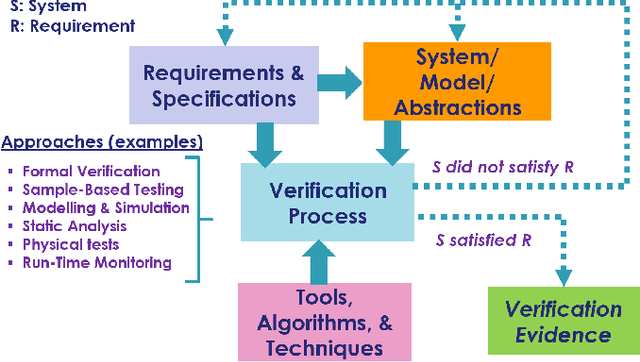
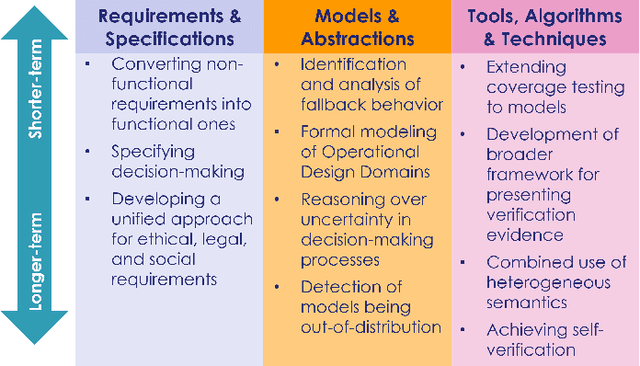
Autonomous systems use independent decision-making with only limited human intervention to accomplish goals in complex and unpredictable environments. As the autonomy technologies that underpin them continue to advance, these systems will find their way into an increasing number of applications in an ever wider range of settings. If we are to deploy them to perform safety-critical or mission-critical roles, it is imperative that we have justified confidence in their safe and correct operation. Verification is the process by which such confidence is established. However, autonomous systems pose challenges to existing verification practices. This paper highlights viewpoints of the Roadmap Working Group of the IEEE Robotics and Automation Society Technical Committee for Verification of Autonomous Systems, identifying these grand challenges, and providing a vision for future research efforts that will be needed to address them.
ROSMonitoring 2.0: Extending ROS Runtime Verification to Services and Ordered Topics
Nov 21, 2024Formal verification of robotic applications presents challenges due to their hybrid nature and distributed architecture. This paper introduces ROSMonitoring 2.0, an extension of ROSMonitoring designed to facilitate the monitoring of both topics and services while considering the order in which messages are published and received. The framework has been enhanced to support these novel features for ROS1 -- and partially ROS2 environments -- offering improved real-time support, security, scalability, and interoperability. We discuss the modifications made to accommodate these advancements and present results obtained from a case study involving the runtime monitoring of specific components of a fire-fighting Uncrewed Aerial Vehicle (UAV).
* In Proceedings FMAS2024, arXiv:2411.13215
Specifying Agent Ethics (Blue Sky Ideas)
Mar 24, 2024We consider the question of what properties a Machine Ethics system should have. This question is complicated by the existence of ethical dilemmas with no agreed upon solution. We provide an example to motivate why we do not believe falling back on the elicitation of values from stakeholders is sufficient to guarantee correctness of such systems. We go on to define two broad categories of ethical property that have arisen in our own work and present a challenge to the community to approach this question in a more systematic way.
Advising Autonomous Cars about the Rules of the Road
Sep 28, 2022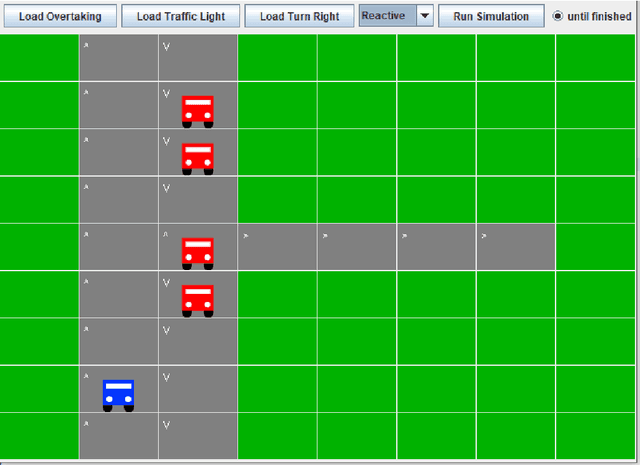
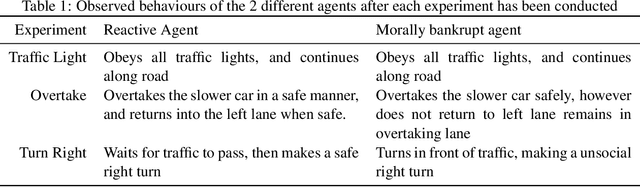
This paper describes (R)ules (o)f (T)he (R)oad (A)dvisor, an agent that provides recommended and possible actions to be generated from a set of human-level rules. We describe the architecture and design of RoTRA, both formally and with an example. Specifically, we use RoTRA to formalise and implement the UK "Rules of the Road", and describe how this can be incorporated into autonomous cars such that they can reason internally about obeying the rules of the road. In addition, the possible actions generated are annotated to indicate whether the rules state that the action must be taken or that they only recommend that the action should be taken, as per the UK Highway Code (Rules of The Road). The benefits of utilising this system include being able to adapt to different regulations in different jurisdictions; allowing clear traceability from rules to behaviour, and providing an external automated accountability mechanism that can check whether the rules were obeyed in some given situation. A simulation of an autonomous car shows, via a concrete example, how trust can be built by putting the autonomous vehicle through a number of scenarios which test the car's ability to obey the rules of the road. Autonomous cars that incorporate this system are able to ensure that they are obeying the rules of the road and external (legal or regulatory) bodies can verify that this is the case, without the vehicle or its manufacturer having to expose their source code or make their working transparent, thus allowing greater trust between car companies, jurisdictions, and the general public.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
Towards Compositional Verification for Modular Robotic Systems
Dec 03, 2020

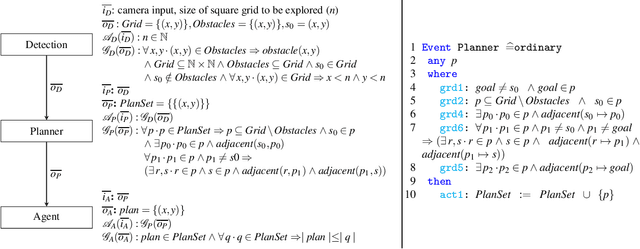
Software engineering of modular robotic systems is a challenging task, however, verifying that the developed components all behave as they should individually and as a whole presents its own unique set of challenges. In particular, distinct components in a modular robotic system often require different verification techniques to ensure that they behave as expected. Ensuring whole system consistency when individual components are verified using a variety of techniques and formalisms is difficult. This paper discusses how to use compositional verification to integrate the various verification techniques that are applied to modular robotic software, using a First-Order Logic (FOL) contract that captures each component's assumptions and guarantees. These contracts can then be used to guide the verification of the individual components, be it by testing or the use of a formal method. We provide an illustrative example of an autonomous robot used in remote inspection. We also discuss a way of defining confidence for the verification associated with each component.
* In Proceedings FMAS 2020, arXiv:2012.01176
Heterogeneous Verification of an Autonomous Curiosity Rover
Jul 20, 2020
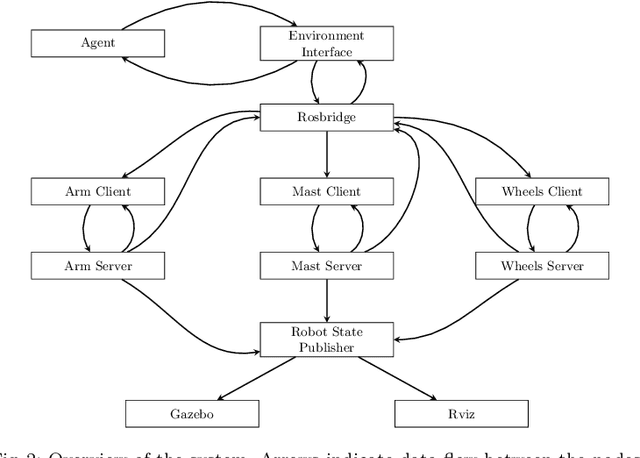
The Curiosity rover is one of the most complex systems successfully deployed in a planetary exploration mission to date. It was sent by NASA to explore the surface of Mars and to identify potential signs of life. Even though it has limited autonomy on-board, most of its decisions are made by the ground control team. This hinders the speed at which the Curiosity reacts to its environment, due to the communication delays between Earth and Mars. Depending on the orbital position of both planets, it can take 4--24 minutes for a message to be transmitted between Earth and Mars. If the Curiosity were controlled autonomously, it would be able to perform its activities much faster and more flexibly. However, one of the major barriers to increased use of autonomy in such scenarios is the lack of assurances that the autonomous behaviour will work as expected. In this paper, we use a Robot Operating System (ROS) model of the Curiosity that is simulated in Gazebo and add an autonomous agent that is responsible for high-level decision-making. Then, we use a mixture of formal and non-formal techniques to verify the distinct system components (ROS nodes). This use of heterogeneous verification techniques is essential to provide guarantees about the nodes at different abstraction levels, and allows us to bring together relevant verification evidence to provide overall assurance.
A Safety Framework for Critical Systems Utilising Deep Neural Networks
Mar 07, 2020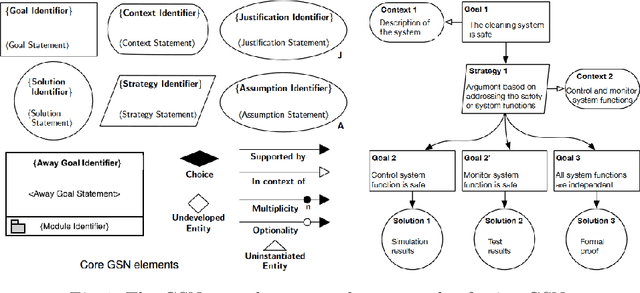
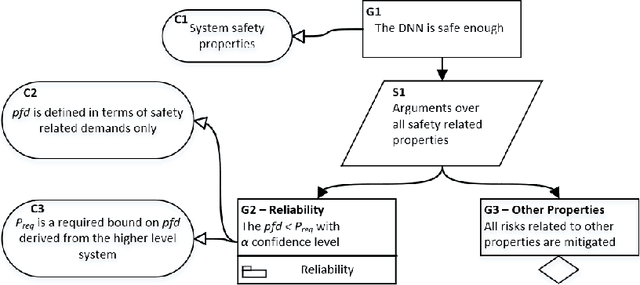
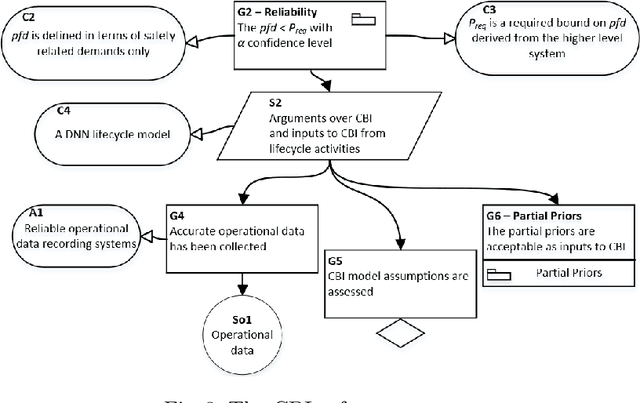
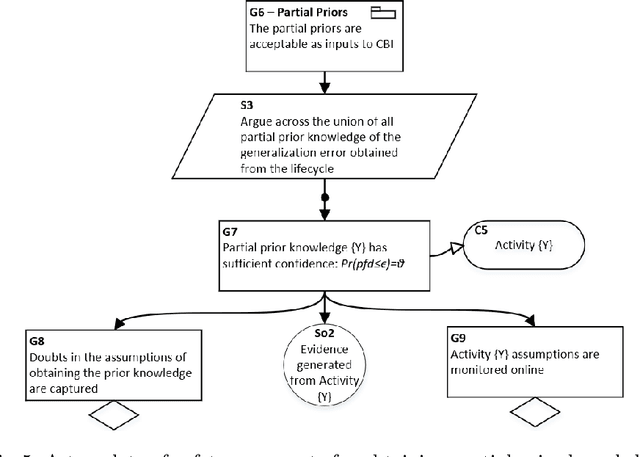
Increasingly sophisticated mathematical modelling processes from Machine Learning are being used to analyse complex data. However, the performance and explainability of these models within practical critical systems requires a rigorous and continuous verification of their safe utilisation. Working towards addressing this challenge, this paper presents a principled novel safety argument framework for critical systems that utilise deep neural networks. The approach allows various forms of predictions, e.g., future reliability of passing some demands, or confidence on a required reliability level. It is supported by a Bayesian analysis using operational data and the recent verification and validation techniques for deep learning. The prediction is conservative -- it starts with partial prior knowledge obtained from lifecycle activities and then determines the worst-case prediction. Open challenges are also identified.
Towards a Framework for Certification of Reliable Autonomous Systems
Jan 24, 2020


A computational system is called autonomous if it is able to make its own decisions, or take its own actions, without human supervision or control. The capability and spread of such systems have reached the point where they are beginning to touch much of everyday life. However, regulators grapple with how to deal with autonomous systems, for example how could we certify an Unmanned Aerial System for autonomous use in civilian airspace? We here analyse what is needed in order to provide verified reliable behaviour of an autonomous system, analyse what can be done as the state-of-the-art in automated verification, and propose a roadmap towards developing regulatory guidelines, including articulating challenges to researchers, to engineers, and to regulators. Case studies in seven distinct domains illustrate the article.