 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecompose-and-Formalise: Recursively Verifiable Natural Language Inference
Jan 27, 2026Recent work has shown that integrating large language models (LLMs) with theorem provers (TPs) in neuro-symbolic pipelines helps with entailment verification and proof-guided refinement of explanations for natural language inference (NLI). However, scaling such refinement to naturalistic NLI remains difficult: long, syntactically rich inputs and deep multi-step arguments amplify autoformalisation errors, where a single local mismatch can invalidate the proof. Moreover, current methods often handle failures via costly global regeneration due to the difficulty of localising the responsible span or step from prover diagnostics. Aiming to address these problems, we propose a decompose-and-formalise framework that (i) decomposes premise-hypothesis pairs into an entailment tree of atomic steps, (ii) verifies the tree bottom-up to isolate failures to specific nodes, and (iii) performs local diagnostic-guided refinement instead of regenerating the whole explanation. Moreover, to improve faithfulness of autoformalisation, we introduce $θ$-substitution in an event-based logical form to enforce consistent argument-role bindings. Across a range of reasoning tasks using five LLM backbones, our method achieves the highest explanation verification rates, improving over the state-of-the-art by 26.2%, 21.7%, 21.6% and 48.9%, while reducing refinement iterations and runtime and preserving strong NLI accuracy.
Safe-ROS: An Architecture for Autonomous Robots in Safety-Critical Domains
Nov 18, 2025Deploying autonomous robots in safety-critical domains requires architectures that ensure operational effectiveness and safety compliance. In this paper, we contribute the Safe-ROS architecture for developing reliable and verifiable autonomous robots in such domains. It features two distinct subsystems: (1) an intelligent control system that is responsible for normal/routine operations, and (2) a Safety System consisting of Safety Instrumented Functions (SIFs) that provide formally verifiable independent oversight. We demonstrate Safe-ROS on an AgileX Scout Mini robot performing autonomous inspection in a nuclear environment. One safety requirement is selected and instantiated as a SIF. To support verification, we implement the SIF as a cognitive agent, programmed to stop the robot whenever it detects that it is too close to an obstacle. We verify that the agent meets the safety requirement and integrate it into the autonomous inspection. This integration is also verified, and the full deployment is validated in a Gazebo simulation, and lab testing. We evaluate this architecture in the context of the UK nuclear sector, where safety and regulation are crucial aspects of deployment. Success criteria include the development of a formal property from the safety requirement, implementation, and verification of the SIF, and the integration of the SIF into the operational robotic autonomous system. Our results demonstrate that the Safe-ROS architecture can provide safety verifiable oversight while deploying autonomous robots in safety-critical domains, offering a robust framework that can be extended to additional requirements and various applications.
* In Proceedings FMAS 2025, arXiv:2511.13245
Faithful and Robust LLM-Driven Theorem Proving for NLI Explanations
May 30, 2025Natural language explanations play a fundamental role in Natural Language Inference (NLI) by revealing how premises logically entail hypotheses. Recent work has shown that the interaction of large language models (LLMs) with theorem provers (TPs) can help verify and improve the validity of NLI explanations. However, TPs require translating natural language into machine-verifiable formal representations, a process that introduces the risk of semantic information loss and unfaithful interpretation, an issue compounded by LLMs' challenges in capturing critical logical structures with sufficient precision. Moreover, LLMs are still limited in their capacity for rigorous and robust proof construction within formal verification frameworks. To mitigate issues related to faithfulness and robustness, this paper investigates strategies to (1) alleviate semantic loss during autoformalisation, (2) efficiently identify and correct syntactic errors in logical representations, (3) explicitly use logical expressions to guide LLMs in generating structured proof sketches, and (4) increase LLMs' capacity of interpreting TP's feedback for iterative refinement. Our empirical results on e-SNLI, QASC and WorldTree using different LLMs demonstrate that the proposed strategies yield significant improvements in autoformalisation (+18.46%, +34.2%, +39.77%) and explanation refinement (+29.5%, +51.5%, +41.25%) over the state-of-the-art model. Moreover, we show that specific interventions on the hybrid LLM-TP architecture can substantially improve efficiency, drastically reducing the number of iterations required for successful verification.
Uncertain Machine Ethics Planning
May 07, 2025Machine Ethics decisions should consider the implications of uncertainty over decisions. Decisions should be made over sequences of actions to reach preferable outcomes long term. The evaluation of outcomes, however, may invoke one or more moral theories, which might have conflicting judgements. Each theory will require differing representations of the ethical situation. For example, Utilitarianism measures numerical values, Deontology analyses duties, and Virtue Ethics emphasises moral character. While balancing potentially conflicting moral considerations, decisions may need to be made, for example, to achieve morally neutral goals with minimal costs. In this paper, we formalise the problem as a Multi-Moral Markov Decision Process and a Multi-Moral Stochastic Shortest Path Problem. We develop a heuristic algorithm based on Multi-Objective AO*, utilising Sven-Ove Hansson's Hypothetical Retrospection procedure for ethical reasoning under uncertainty. Our approach is validated by a case study from Machine Ethics literature: the problem of whether to steal insulin for someone who needs it.
Grand Challenges in the Verification of Autonomous Systems
Nov 21, 2024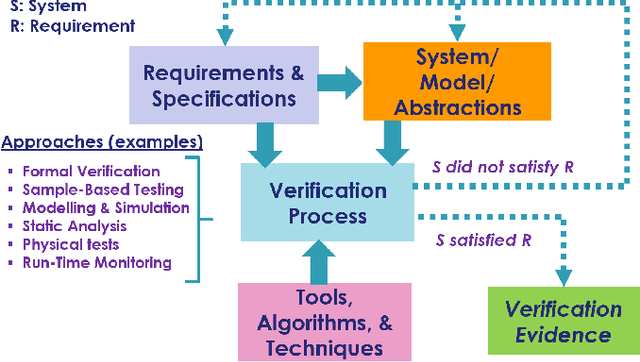
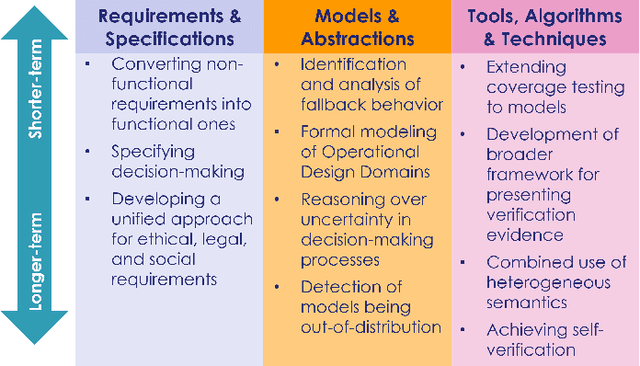
Autonomous systems use independent decision-making with only limited human intervention to accomplish goals in complex and unpredictable environments. As the autonomy technologies that underpin them continue to advance, these systems will find their way into an increasing number of applications in an ever wider range of settings. If we are to deploy them to perform safety-critical or mission-critical roles, it is imperative that we have justified confidence in their safe and correct operation. Verification is the process by which such confidence is established. However, autonomous systems pose challenges to existing verification practices. This paper highlights viewpoints of the Roadmap Working Group of the IEEE Robotics and Automation Society Technical Committee for Verification of Autonomous Systems, identifying these grand challenges, and providing a vision for future research efforts that will be needed to address them.
ROSMonitoring 2.0: Extending ROS Runtime Verification to Services and Ordered Topics
Nov 21, 2024Formal verification of robotic applications presents challenges due to their hybrid nature and distributed architecture. This paper introduces ROSMonitoring 2.0, an extension of ROSMonitoring designed to facilitate the monitoring of both topics and services while considering the order in which messages are published and received. The framework has been enhanced to support these novel features for ROS1 -- and partially ROS2 environments -- offering improved real-time support, security, scalability, and interoperability. We discuss the modifications made to accommodate these advancements and present results obtained from a case study involving the runtime monitoring of specific components of a fire-fighting Uncrewed Aerial Vehicle (UAV).
* In Proceedings FMAS2024, arXiv:2411.13215
Reinforcement Learning and Machine ethics:a systematic review
Jul 02, 2024Machine ethics is the field that studies how ethical behaviour can be accomplished by autonomous systems. While there exist some systematic reviews aiming to consolidate the state of the art in machine ethics prior to 2020, these tend to not include work that uses reinforcement learning agents as entities whose ethical behaviour is to be achieved. The reason for this is that only in the last years we have witnessed an increase in machine ethics studies within reinforcement learning. We present here a systematic review of reinforcement learning for machine ethics and machine ethics within reinforcement learning. Additionally, we highlight trends in terms of ethics specifications, components and frameworks of reinforcement learning, and environments used to result in ethical behaviour. Our systematic review aims to consolidate the work in machine ethics and reinforcement learning thus completing the gap in the state of the art machine ethics landscape
Verification and Refinement of Natural Language Explanations through LLM-Symbolic Theorem Proving
May 02, 2024
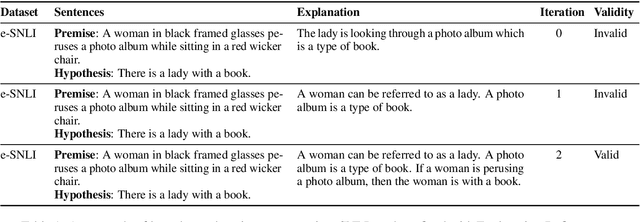


Natural language explanations have become a proxy for evaluating explainable and multi-step Natural Language Inference (NLI) models. However, assessing the validity of explanations for NLI is challenging as it typically involves the crowd-sourcing of apposite datasets, a process that is time-consuming and prone to logical errors. To address existing limitations, this paper investigates the verification and refinement of natural language explanations through the integration of Large Language Models (LLMs) and Theorem Provers (TPs). Specifically, we present a neuro-symbolic framework, named Explanation-Refiner, that augments a TP with LLMs to generate and formalise explanatory sentences and suggest potential inference strategies for NLI. In turn, the TP is employed to provide formal guarantees on the logical validity of the explanations and to generate feedback for subsequent improvements. We demonstrate how Explanation-Refiner can be jointly used to evaluate explanatory reasoning, autoformalisation, and error correction mechanisms of state-of-the-art LLMs as well as to automatically enhance the quality of human-annotated explanations of variable complexity in different domains.
Specifying Agent Ethics (Blue Sky Ideas)
Mar 24, 2024We consider the question of what properties a Machine Ethics system should have. This question is complicated by the existence of ethical dilemmas with no agreed upon solution. We provide an example to motivate why we do not believe falling back on the elicitation of values from stakeholders is sufficient to guarantee correctness of such systems. We go on to define two broad categories of ethical property that have arisen in our own work and present a challenge to the community to approach this question in a more systematic way.
Enhancing Ethical Explanations of Large Language Models through Iterative Symbolic Refinement
Feb 01, 2024An increasing amount of research in Natural Language Inference (NLI) focuses on the application and evaluation of Large Language Models (LLMs) and their reasoning capabilities. Despite their success, however, LLMs are still prone to factual errors and inconsistencies in their explanations, offering limited control and interpretability for inference in complex domains. In this paper, we focus on ethical NLI, investigating how hybrid neuro-symbolic techniques can enhance the logical validity and alignment of ethical explanations produced by LLMs. Specifically, we present an abductive-deductive framework named Logic-Explainer, which integrates LLMs with an external backward-chaining solver to refine step-wise natural language explanations and jointly verify their correctness, reduce incompleteness and minimise redundancy. An extensive empirical analysis demonstrates that Logic-Explainer can improve explanations generated via in-context learning methods and Chain-of-Thought (CoT) on challenging ethical NLI tasks, while, at the same time, producing formal proofs describing and supporting models' reasoning. As ethical NLI requires commonsense reasoning to identify underlying moral violations, our results suggest the effectiveness of neuro-symbolic methods for multi-step NLI more broadly, opening new opportunities to enhance the logical consistency, reliability, and alignment of LLMs.