 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Systems' Safety Cases for use in UK Nuclear Environments
Oct 03, 2023
An overview of the process to develop a safety case for an autonomous robot deployment on a nuclear site in the UK is described and a safety case for a hypothetical robot incorporating AI is presented. This forms a first step towards a deployment, showing what is possible now and what may be possible with development of tools. It forms the basis for further discussion between nuclear site licensees, the Office for Nuclear Regulation (ONR), industry and academia.
* In Proceedings AREA 2023, arXiv:2310.00333
Propagation Measurements and Analyses at 28 GHz via an Autonomous Beam-Steering Platform
Feb 16, 2023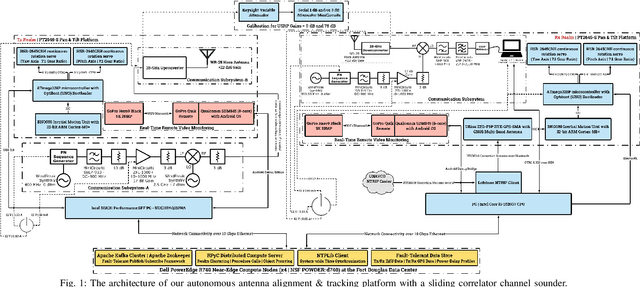


This paper details the design of an autonomous alignment and tracking platform to mechanically steer directional horn antennas in a sliding correlator channel sounder setup for 28 GHz V2X propagation modeling. A pan-and-tilt subsystem facilitates uninhibited rotational mobility along the yaw and pitch axes, driven by open-loop servo units and orchestrated via inertial motion controllers. A geo-positioning subsystem augmented in accuracy by real-time kinematics enables navigation events to be shared between a transmitter and receiver over an Apache Kafka messaging middleware framework with fault tolerance. Herein, our system demonstrates a 3D geo-positioning accuracy of 17 cm, an average principal axes positioning accuracy of 1.1 degrees, and an average tracking response time of 27.8 ms. Crucially, fully autonomous antenna alignment and tracking facilitates continuous series of measurements, a unique yet critical necessity for millimeter wave channel modeling in vehicular networks. The power-delay profiles, collected along routes spanning urban and suburban neighborhoods on the NSF POWDER testbed, are used in pathloss evaluations involving the 3GPP TR38.901 and ITU-R M.2135 standards. Empirically, we demonstrate that these models fail to accurately capture the 28 GHz pathloss behavior in urban foliage and suburban radio environments. In addition to RMS direction-spread analyses for angles-of-arrival via the SAGE algorithm, we perform signal decoherence studies wherein we derive exponential models for the spatial/angular autocorrelation coefficient under distance and alignment effects.
A Robotic Antenna Alignment and Tracking System for Millimeter Wave Propagation Modeling
Oct 14, 2021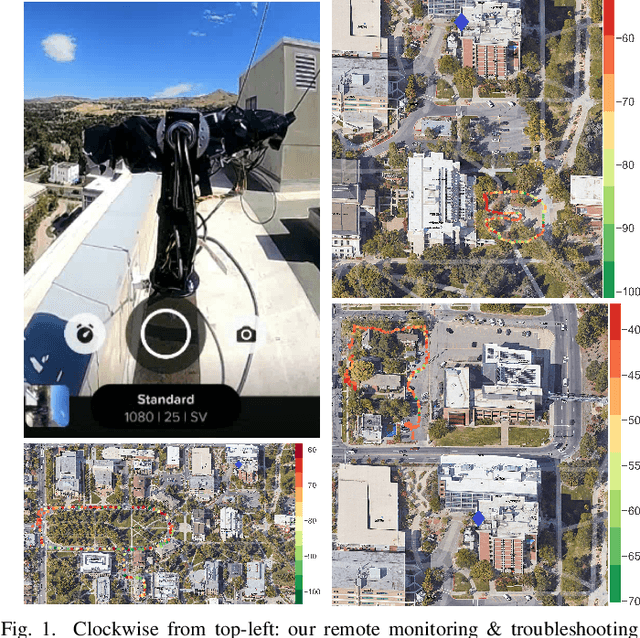

In this paper, we discuss the design of a sliding-correlator channel sounder for 28 GHz propagation modeling on the NSF POWDER testbed in Salt Lake City, UT. Beam-alignment is mechanically achieved via a fully autonomous robotic antenna tracking platform, designed using commercial off-the-shelf components. Equipped with an Apache Zookeeper/Kafka managed fault-tolerant publish-subscribe framework, we demonstrate tracking response times of 27.8 ms, in addition to superior scalability over state-of-the-art mechanical beam-steering systems. Enhanced with real-time kinematic correction streams, our geo-positioning subsystem achieves a 3D accuracy of 17 cm, while our principal axes positioning subsystem achieves an average accuracy of 1.1 degrees across yaw and pitch movements. Finally, by facilitating remote orchestration (via managed containers), uninhibited rotation (via encapsulation), and real-time positioning visualization (via Dash/MapBox), we exhibit a proven prototype well-suited for V2X measurements.
Challenges and Opportunities of Future Rural Wireless Communications
Aug 11, 2021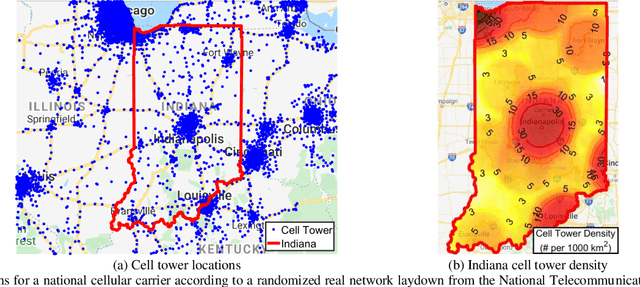

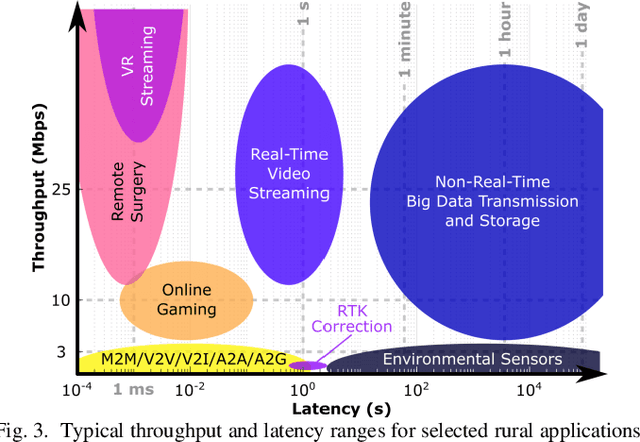
Broadband access is key to ensuring robust economic development and improving quality of life. Unfortunately, the communication infrastructure deployed in rural areas throughout the world lags behind its urban counterparts due to low population density and economics. This article examines the motivations and challenges of providing broadband access over vast rural regions, with an emphasis on the wireless aspect in view of its irreplaceable role in closing the digital gap. Applications and opportunities for future rural wireless communications are discussed for a variety of areas, including residential welfare, digital agriculture, and transportation. This article also comprehensively investigates current and emerging wireless technologies that could facilitate rural deployment. Although there is no simple solution, there is an urgent need for researchers to work on coverage, cost, and reliability of rural wireless access.