 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robotic Antenna Alignment and Tracking System for Millimeter Wave Propagation Modeling
Paper and Code
Oct 14, 2021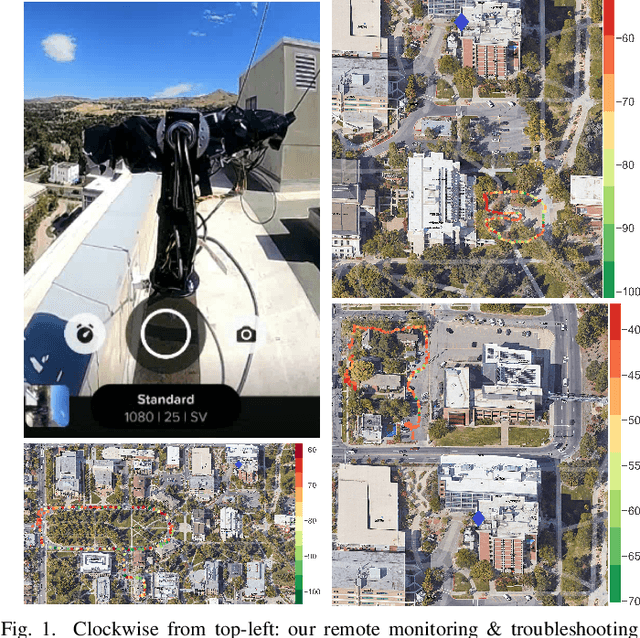

In this paper, we discuss the design of a sliding-correlator channel sounder for 28 GHz propagation modeling on the NSF POWDER testbed in Salt Lake City, UT. Beam-alignment is mechanically achieved via a fully autonomous robotic antenna tracking platform, designed using commercial off-the-shelf components. Equipped with an Apache Zookeeper/Kafka managed fault-tolerant publish-subscribe framework, we demonstrate tracking response times of 27.8 ms, in addition to superior scalability over state-of-the-art mechanical beam-steering systems. Enhanced with real-time kinematic correction streams, our geo-positioning subsystem achieves a 3D accuracy of 17 cm, while our principal axes positioning subsystem achieves an average accuracy of 1.1 degrees across yaw and pitch movements. Finally, by facilitating remote orchestration (via managed containers), uninhibited rotation (via encapsulation), and real-time positioning visualization (via Dash/MapBox), we exhibit a proven prototype well-suited for V2X measurements.