 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint UAV Placement and Transceiver Design in Multi-User Wireless Relay Networks
Jul 16, 2025In this paper, a novel approach is proposed to improve the minimum signal-to-interference-plus-noise-ratio (SINR) among users in non-orthogonal multi-user wireless relay networks, by optimizing the placement of unmanned aerial vehicle (UAV) relays, relay beamforming, and receive combining. The design is separated into two problems: beamforming-aware UAV placement optimization and transceiver design for minimum SINR maximization. A significant challenge in beamforming-aware UAV placement optimization is the lack of instantaneous channel state information (CSI) prior to deploying UAV relays, making it difficult to derive the beamforming SINR in non-orthogonal multi-user transmission. To address this issue, an approximation of the expected beamforming SINR is derived using the narrow beam property of a massive MIMO base station. Based on this, a UAV placement algorithm is proposed to provide UAV positions that improve the minimum expected beamforming SINR among users, using a difference-of-convex framework. Subsequently, after deploying the UAV relays to the optimized positions, and with estimated CSI available, a joint relay beamforming and receive combining (JRBC) algorithm is proposed to optimize the transceiver to improve the minimum beamforming SINR among users, using a block-coordinate descent approach. Numerical results show that the UAV placement algorithm combined with the JRBC algorithm provides a 4.6 dB SINR improvement over state-of-the-art schemes.
Enhancing Pavement Sensor Data Acquisition for AI-Driven Transportation Research
Feb 20, 2025Effective strategies for sensor data management are essential for advancing transportation research, especially in the current data-driven era, due to the advent of novel applications in artificial intelligence. This paper presents comprehensive guidelines for managing transportation sensor data, encompassing both archived static data and real-time data streams. The real-time system architecture integrates various applications with data acquisition systems (DAQ). By deploying the in-house designed, open-source Avena software platform alongside the NATS messaging system as a secure communication broker, reliable data exchange is ensured. While robust databases like TimescaleDB facilitate organized storage, visualization platforms like Grafana provide real-time monitoring capabilities. In contrast, static data standards address the challenges in handling unstructured, voluminous datasets. The standards advocate for a combination of cost-effective bulk cloud storage for unprocessed sensor data and relational databases for recording summarized analyses. They highlight the role of cloud data transfer tools like FME for efficient migration of sensor data from local storages onto the cloud. Further, integration of robust visualization tools into the framework helps in deriving patterns and trends from these complex datasets. The proposals were applied to INDOT's real-world case studies involving the I-65 and I-69 Greenfield districts. For real-time data collection, Campbell Scientific DAQ systems were used, enabling continuous generation and monitoring of sensor metrics. In the case of the archived I-69 database, summary data was compiled in Oracle, while the unprocessed data was stored in SharePoint. The results underline the effectiveness of the proposed guidelines and motivate their adoption in research projects.
Hybrid Fingerprint-based Positioning in Cell-Free Massive MIMO Systems
Feb 04, 2025



Recently, there has been an increasing interest in 6G technology for integrated sensing and communications, where positioning stands out as a key application. In the realm of 6G, cell-free massive multiple-input multiple-output (MIMO) systems, featuring distributed base stations equipped with a large number of antennas, present an abundant source of angle-of-arrival (AOA) information that could be exploited for positioning applications. In this paper we leverage this AOA information at the base stations using the multiple signal classification (MUSIC) algorithm, in conjunction with received signal strength (RSS) for positioning through Gaussian process regression (GPR). An AOA fingerprint database is constructed by capturing the angle data from multiple locations across the network area and is combined with RSS data from the same locations to form a hybrid fingerprint which is then used to train a GPR model employing a squared exponential kernel. The trained regression model is subsequently utilized to estimate the location of a user equipment. Simulations demonstrate that the GPR model with hybrid input achieves better positioning accuracy than traditional GPR models utilizing RSS-only and AOA-only inputs.
Spatial-Division ISAC: A Practical Waveform Design Strategy via Null-Space Superimposition
Dec 13, 2024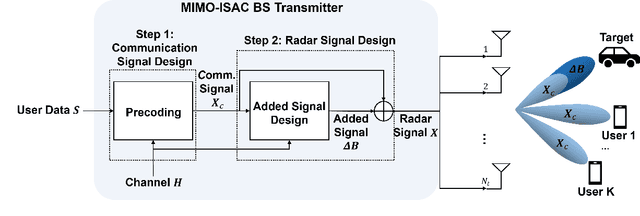
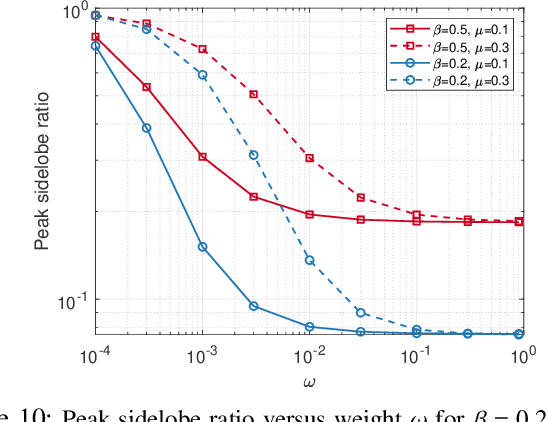
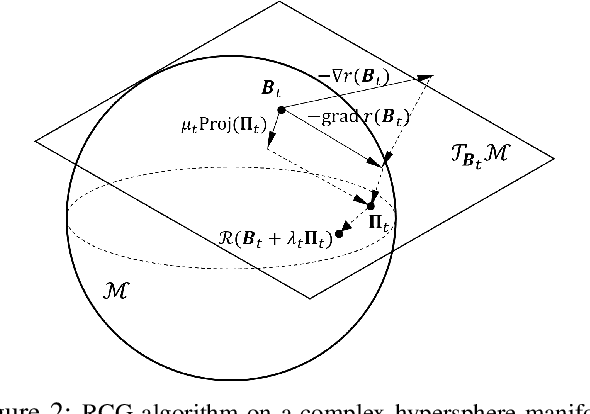
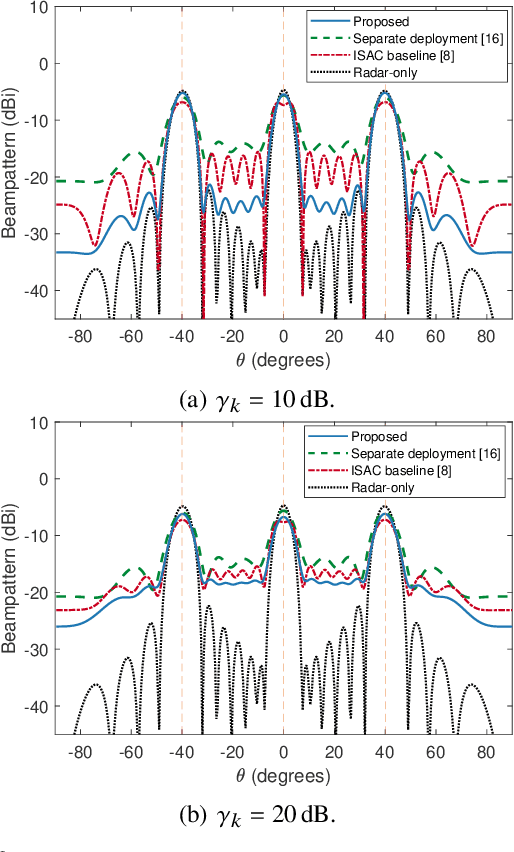
Integrated sensing and communications (ISAC) is a key enabler of new applications, such as precision agriculture, extended reality (XR), and digital twins, for 6G wireless systems. However, the implementation of ISAC technology is very challenging due to practical constraints such as high complexity. In this paper, we introduce a novel ISAC waveform design strategy, called the spatial-division ISAC (SD-ISAC) waveform, which simplifies the ISAC waveform design problem by decoupling it into separate communication and radar waveform design tasks. Specifically, the proposed strategy leverages the null-space of the communication channel to superimpose sensing signals onto communication signals without interference. This approach offers multiple benefits, including reduced complexity and the reuse of existing communication and radar waveforms. We then address the problem of optimizing the spatial and temporal properties of the proposed waveform. We develop a low-complexity beampattern matching algorithm, leveraging a majorization-minimization (MM) technique. Furthermore, we develop a range sidelobe suppression algorithm based on manifold optimization. We provide comprehensive discussions on the practical advantages and potential challenges of the proposed method, including null-space feedback. We evaluate the performance of the proposed waveform design algorithm through extensive simulations. Simulation results show that the proposed method can provide similar or even superior performance to existing ISAC algorithms while reducing computation time significantly.
Simulation-Enhanced Data Augmentation for Machine Learning Pathloss Prediction
Feb 06, 2024Machine learning (ML) offers a promising solution to pathloss prediction. However, its effectiveness can be degraded by the limited availability of data. To alleviate these challenges, this paper introduces a novel simulation-enhanced data augmentation method for ML pathloss prediction. Our method integrates synthetic data generated from a cellular coverage simulator and independently collected real-world datasets. These datasets were collected through an extensive measurement campaign in different environments, including farms, hilly terrains, and residential areas. This comprehensive data collection provides vital ground truth for model training. A set of channel features was engineered, including geographical attributes derived from LiDAR datasets. These features were then used to train our prediction model, incorporating the highly efficient and robust gradient boosting ML algorithm, CatBoost. The integration of synthetic data, as demonstrated in our study, significantly improves the generalizability of the model in different environments, achieving a remarkable improvement of approximately 12dB in terms of mean absolute error for the best-case scenario. Moreover, our analysis reveals that even a small fraction of measurements added to the simulation training set, with proper data balance, can significantly enhance the model's performance.
Constant Modulus Waveform Design with Block-Level Interference Exploitation for DFRC Systems
Nov 04, 2023Dual-functional radar-communication (DFRC) is a promising technology where radar and communication functions operate on the same spectrum and hardware. In this paper, we propose an algorithm for designing constant modulus waveforms for DFRC systems. Particularly, we jointly optimize the correlation properties and the spatial beam pattern. For communication, we employ constructive interference-based block-level precoding (CI-BLP) to exploit distortion due to multi-user and radar transmission. We propose a majorization-minimization (MM)-based solution to the formulated problem. To accelerate convergence, we propose an improved majorizing function that leverages a novel diagonal matrix structure. We then evaluate the performance of the proposed algorithm through rigorous simulations. Simulation results demonstrate the effectiveness of the proposed approach and the proposed majorizer.
Dynamic and Robust Sensor Selection Strategies for Wireless Positioning with TOA/RSS Measurement
Apr 30, 2023



Emerging wireless applications are requiring ever more accurate location-positioning from sensor measurements. In this paper, we develop sensor selection strategies for 3D wireless positioning based on time of arrival (TOA) and received signal strength (RSS) measurements to handle two distinct scenarios: (i) known approximated target location, for which we conduct dynamic sensor selection to minimize the positioning error; and (ii) unknown approximated target location, in which the worst-case positioning error is minimized via robust sensor selection. We derive expressions for the Cram\'er-Rao lower bound (CRLB) as a performance metric to quantify the positioning accuracy resulted from selected sensors. For dynamic sensor selection, two greedy selection strategies are proposed, each of which exploits properties revealed in the derived CRLB expressions. These selection strategies are shown to strike an efficient balance between computational complexity and performance suboptimality. For robust sensor selection, we show that the conventional convex relaxation approach leads to instability, and then develop three algorithms based on (i) iterative convex optimization (ICO), (ii) difference of convex functions programming (DCP), and (iii) discrete monotonic optimization (DMO). Each of these strategies exhibits a different tradeoff between computational complexity and optimality guarantee. Simulation results show that the proposed sensor selection strategies provide significant improvements in terms of accuracy and/or complexity compared to existing sensor selection methods.
Propagation Measurements and Analyses at 28 GHz via an Autonomous Beam-Steering Platform
Feb 16, 2023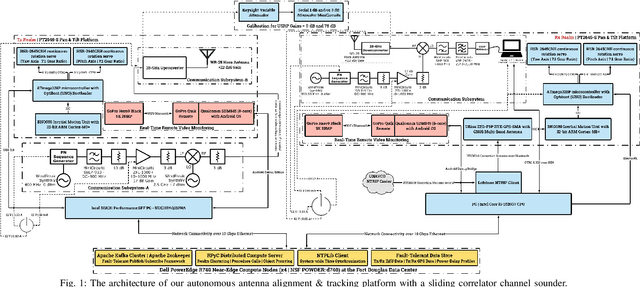

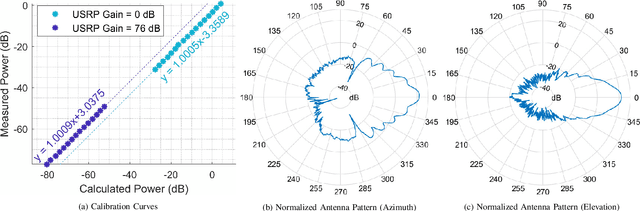

This paper details the design of an autonomous alignment and tracking platform to mechanically steer directional horn antennas in a sliding correlator channel sounder setup for 28 GHz V2X propagation modeling. A pan-and-tilt subsystem facilitates uninhibited rotational mobility along the yaw and pitch axes, driven by open-loop servo units and orchestrated via inertial motion controllers. A geo-positioning subsystem augmented in accuracy by real-time kinematics enables navigation events to be shared between a transmitter and receiver over an Apache Kafka messaging middleware framework with fault tolerance. Herein, our system demonstrates a 3D geo-positioning accuracy of 17 cm, an average principal axes positioning accuracy of 1.1 degrees, and an average tracking response time of 27.8 ms. Crucially, fully autonomous antenna alignment and tracking facilitates continuous series of measurements, a unique yet critical necessity for millimeter wave channel modeling in vehicular networks. The power-delay profiles, collected along routes spanning urban and suburban neighborhoods on the NSF POWDER testbed, are used in pathloss evaluations involving the 3GPP TR38.901 and ITU-R M.2135 standards. Empirically, we demonstrate that these models fail to accurately capture the 28 GHz pathloss behavior in urban foliage and suburban radio environments. In addition to RMS direction-spread analyses for angles-of-arrival via the SAGE algorithm, we perform signal decoherence studies wherein we derive exponential models for the spatial/angular autocorrelation coefficient under distance and alignment effects.
Data-Driven Web-Based Patching Management Tool Using Multi-Sensor Pavement Structure Measurements
Feb 10, 2023Automating pavement maintenance suggestions is challenging,especially for actionable recommendations such as patching location,depth and priority.It is common practice among State agencies to manually inspect road segments of interest and decide maintenance requirements based on the pavement condition index (PCI).However,standalone PCI only evaluates the pavement surface condition and coupled with the variability in human perception of pavement distress,limits the accuracy and quality of current pavement maintenance practices.Here,a need for multi-sensor data integrated with standardized pavement distress condition ratings is required.This study explores the possibility of estimating the appropriate pavement patching strategy (i.e.,patching location,depth,and quantity) by integrating pavement structural and surface condition assessment with pavement specific ratings of distress.Especially,it combines pavement structural condition assessment parameter;falling weight deflectometer deflections along with surface condition assessment parameters;international roughness index,and cracking density for a better representation of overall pavement distress condition.Then,a pavement specific threshold-based patching suggestion algorithm is implemented to evaluate the pavement overall distress condition into a priority-based patching suggestion.The novelty in the use of pavement specific thresholds is placed on its data-driven ability to determine threshold values from current road condition measurements using a reliability concept validated by the theoretical pavement condition rating,pavement structural number.A web-based patching manager tool (PMT) was implemented to automate the patching suggestion procedure and visualize the results.Validated with road surface images obtained from three-dimensional laser sensors,PMT could successfully capture localized distresses in existing pavements.
Dual-Wideband Time-Varying Sub-Terahertz Massive MIMO Systems: A Compressed Training Framework
Jan 04, 2022
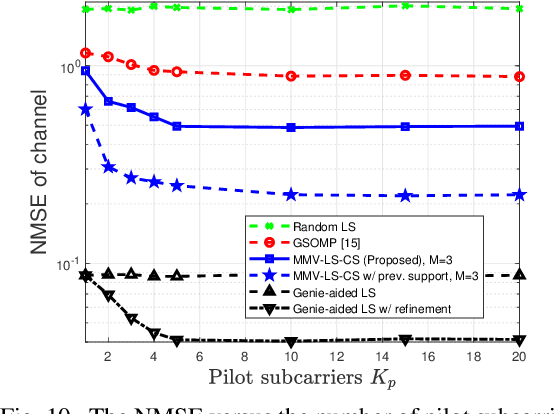
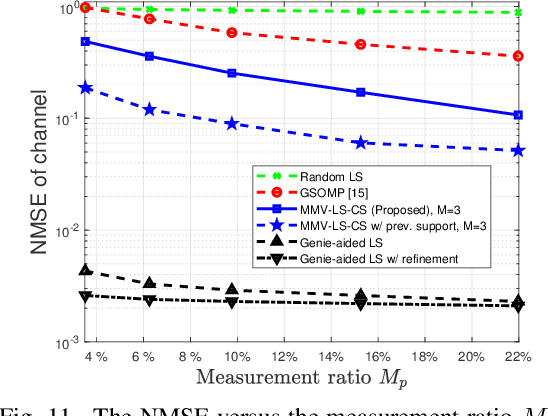
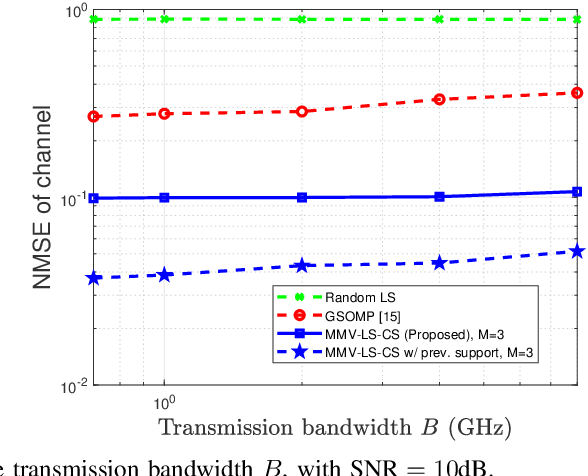
Designers of beyond-5G systems are planning to use new frequencies in the millimeter wave (mmWave) and sub-terahertz (sub-THz) bands to meet ever-increasing demand for wireless broadband access. Sub-THz communication, however, will come with many challenges of mmWave communication and new challenges associated with the wider bandwidths, larger numbers of antennas and harsher propagation characteristics. Notably the frequency- and spatial-wideband (dual-wideband) effects are significant at sub-THz. To address these challenges, this paper presents a compressed training framework to estimate the sub-THz time-varying MIMO-OFDM channels. A set of frequency-dependent array response matrices are constructed, enabling the channel recovery from multiple observations across subcarriers via multiple measurement vectors (MMV). Capitalizing on the temporal correlation, MMV least squares (MMV-LS) is designed to estimate the channel on the previous beam index support, followed by MMV compressed sensing (MMV-CS) on the residual signal to estimate the time-varying channel components. Furthermore, a channel refinement algorithm is proposed to estimate the path coefficients and time delays of the dominant paths. To reduce the computational complexity, a sequential search method using hierarchical codebooks is proposed for greedy beam selection. Numerical results show that MMV-LS-CS achieves a more accurate and robust channel estimation than state-of-the-art algorithms on time-varying dual-wideband MIMO-OFDM.