 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-Driven Ensemble Machine Learning for Robust and Generalizable Path Loss Prediction
May 23, 2026Machine learning has emerged as a promising approach to path loss prediction, yet its effectiveness often degrades when measurement data are scarce. To address this limitation, we propose an ensemble-based machine learning framework that integrates real measurements with synthetic data generated using a lidar-based simulator. The simulator provides broad spatial coverage through static path loss values that capture terrain variations and physical obstacles in the propagation environment. A dynamically weighted ensemble then combines simulation results with measured data, balancing the contribution of both data sources and improving generalization across diverse environments. To further mitigate the effects of limited measurements, we incorporate the Synthetic Minority Over-sampling Technique (SMOTE), a data augmentation technique that synthesizes additional samples through interpolation between measurements while preserving their statistical properties. By leveraging simulation data, SMOTE, and engineered propagation features, the proposed framework captures geographical and physical variability, enabling adaptability across urban, suburban, residential, industrial, and rural environments. Experimental results demonstrate that the proposed method achieves up to a 50% reduction in mean absolute error (MAE), compared with models trained solely on real data, and up to a 25% improvement relative to models trained exclusively on synthetic data, particularly for cross-environment generalization. These findings highlight the effectiveness of combining simulation-based synthetic data with SMOTE to overcome data scarcity and enhance the model's generalization ability. Overall, the proposed framework provides a robust and practical solution for path loss prediction across diverse environments with limited measurement data, supporting cost-effective planning and optimization of wireless networks.
Hybrid Fingerprint-based Positioning in Cell-Free Massive MIMO Systems
Feb 04, 2025



Recently, there has been an increasing interest in 6G technology for integrated sensing and communications, where positioning stands out as a key application. In the realm of 6G, cell-free massive multiple-input multiple-output (MIMO) systems, featuring distributed base stations equipped with a large number of antennas, present an abundant source of angle-of-arrival (AOA) information that could be exploited for positioning applications. In this paper we leverage this AOA information at the base stations using the multiple signal classification (MUSIC) algorithm, in conjunction with received signal strength (RSS) for positioning through Gaussian process regression (GPR). An AOA fingerprint database is constructed by capturing the angle data from multiple locations across the network area and is combined with RSS data from the same locations to form a hybrid fingerprint which is then used to train a GPR model employing a squared exponential kernel. The trained regression model is subsequently utilized to estimate the location of a user equipment. Simulations demonstrate that the GPR model with hybrid input achieves better positioning accuracy than traditional GPR models utilizing RSS-only and AOA-only inputs.
Spatial-Division ISAC: A Practical Waveform Design Strategy via Null-Space Superimposition
Dec 13, 2024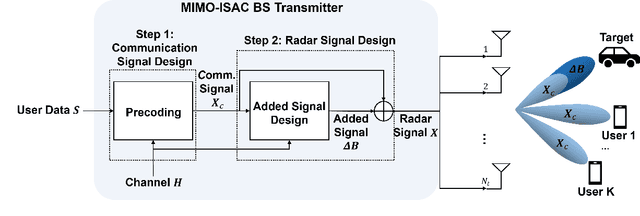
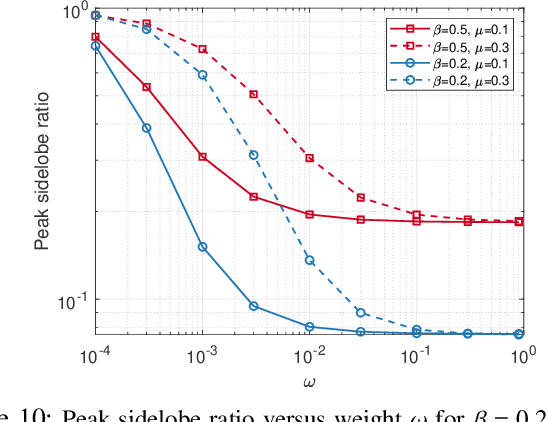
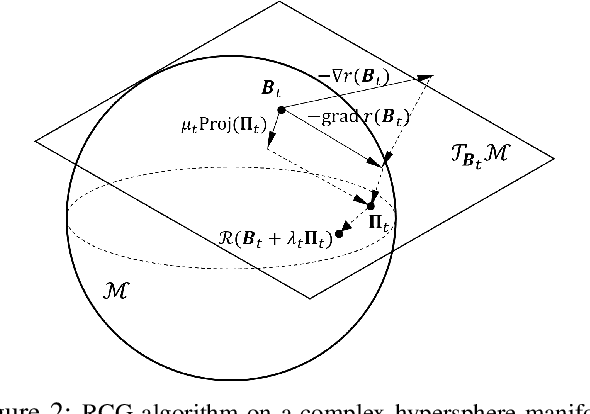
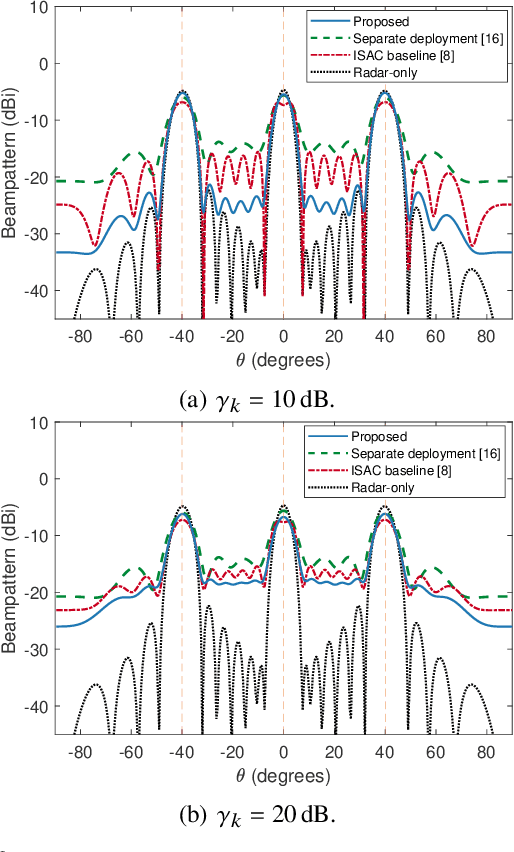
Integrated sensing and communications (ISAC) is a key enabler of new applications, such as precision agriculture, extended reality (XR), and digital twins, for 6G wireless systems. However, the implementation of ISAC technology is very challenging due to practical constraints such as high complexity. In this paper, we introduce a novel ISAC waveform design strategy, called the spatial-division ISAC (SD-ISAC) waveform, which simplifies the ISAC waveform design problem by decoupling it into separate communication and radar waveform design tasks. Specifically, the proposed strategy leverages the null-space of the communication channel to superimpose sensing signals onto communication signals without interference. This approach offers multiple benefits, including reduced complexity and the reuse of existing communication and radar waveforms. We then address the problem of optimizing the spatial and temporal properties of the proposed waveform. We develop a low-complexity beampattern matching algorithm, leveraging a majorization-minimization (MM) technique. Furthermore, we develop a range sidelobe suppression algorithm based on manifold optimization. We provide comprehensive discussions on the practical advantages and potential challenges of the proposed method, including null-space feedback. We evaluate the performance of the proposed waveform design algorithm through extensive simulations. Simulation results show that the proposed method can provide similar or even superior performance to existing ISAC algorithms while reducing computation time significantly.
Constant Modulus Waveform Design with Interference Exploitation for DFRC Systems: A Block-Level Optimization Approach
Jun 27, 2024



Dual-function radar-communication (DFRC) is a key enabler of location-based services for next-generation communication systems. In this paper, we investigate the problem of designing constant modulus waveforms for DFRC systems. For high-precision radar sensing, we consider joint optimization of the correlation properties and spatial beam pattern. For communication, we employ constructive interference-based block-level precoding (CI-BLP) to leverage distortion induced by multiuser multiple-input multiple-output (MU-MIMO) and radar transmission on a block level. We propose two solution algorithms based on the alternating direction method of multipliers (ADMM) and majorization-minimization (MM) principles, which are effective for small and large block sizes, respectively. The proposed ADMM-based solution decomposes the nonconvex formulated problem into multiple tractable subproblems, each of which admits a closed-form solution. To accelerate convergence of the MM-based solution, we propose an improved majorizing function that leverages a novel diagonal matrix structure. After majorization, we decompose the approximated problem into independent subproblems for parallelization, mitigating the complexity that increases with block size. We then evaluate the performance of the proposed algorithms through a series of numerical experiments. Simulation results demonstrate that the proposed methods can substantially enhance spatial/temporal sidelobe suppression through block-level optimization.
Simulation-Enhanced Data Augmentation for Machine Learning Pathloss Prediction
Feb 06, 2024Machine learning (ML) offers a promising solution to pathloss prediction. However, its effectiveness can be degraded by the limited availability of data. To alleviate these challenges, this paper introduces a novel simulation-enhanced data augmentation method for ML pathloss prediction. Our method integrates synthetic data generated from a cellular coverage simulator and independently collected real-world datasets. These datasets were collected through an extensive measurement campaign in different environments, including farms, hilly terrains, and residential areas. This comprehensive data collection provides vital ground truth for model training. A set of channel features was engineered, including geographical attributes derived from LiDAR datasets. These features were then used to train our prediction model, incorporating the highly efficient and robust gradient boosting ML algorithm, CatBoost. The integration of synthetic data, as demonstrated in our study, significantly improves the generalizability of the model in different environments, achieving a remarkable improvement of approximately 12dB in terms of mean absolute error for the best-case scenario. Moreover, our analysis reveals that even a small fraction of measurements added to the simulation training set, with proper data balance, can significantly enhance the model's performance.
Constant Modulus Waveform Design with Block-Level Interference Exploitation for DFRC Systems
Nov 04, 2023Dual-functional radar-communication (DFRC) is a promising technology where radar and communication functions operate on the same spectrum and hardware. In this paper, we propose an algorithm for designing constant modulus waveforms for DFRC systems. Particularly, we jointly optimize the correlation properties and the spatial beam pattern. For communication, we employ constructive interference-based block-level precoding (CI-BLP) to exploit distortion due to multi-user and radar transmission. We propose a majorization-minimization (MM)-based solution to the formulated problem. To accelerate convergence, we propose an improved majorizing function that leverages a novel diagonal matrix structure. We then evaluate the performance of the proposed algorithm through rigorous simulations. Simulation results demonstrate the effectiveness of the proposed approach and the proposed majorizer.
Data Fusion-Based Predictive Beamforming for Downlink UAV-Assisted Massive MIMO Communication
Sep 10, 2023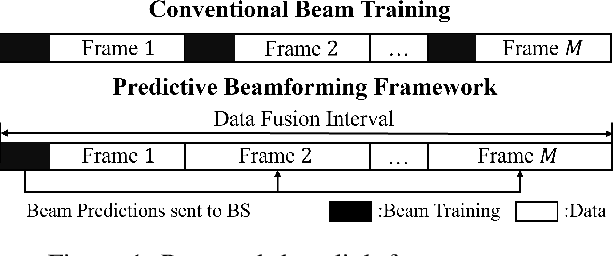
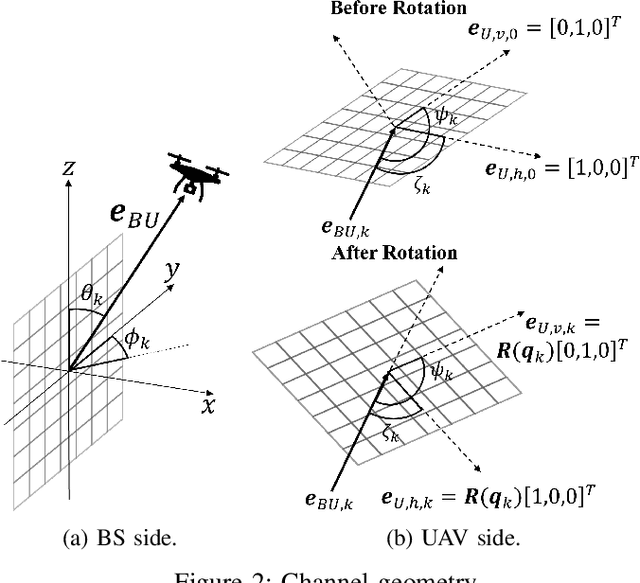
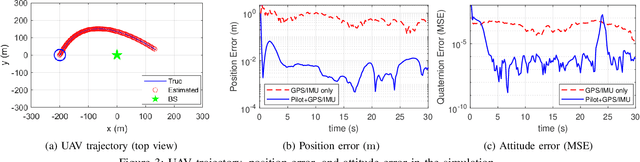
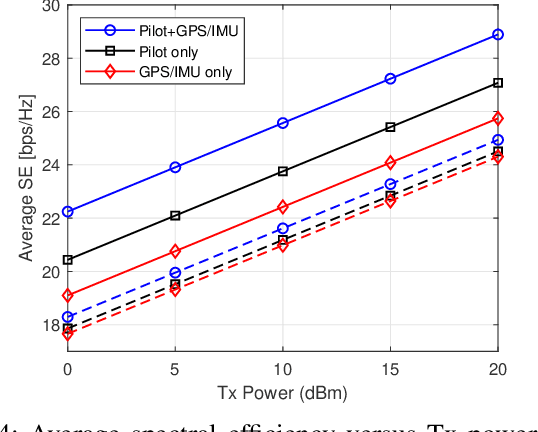
In this letter, we propose a data fusion-based predictive beamforming scheme for unmanned aerial vehicle (UAV)-assisted massive multiple-input multiple-output (MIMO) communication, which involves a base station and UAV, each equipped with a massive MIMO array. We consider aircraft dynamics to track and predict the trajectory and orientation of the UAV. To improve communication and tracking performance, we propose a novel fusion of the channel and motion data of the UAV using an extended Kalman filter (EKF). Simulation results demonstrate that the proposed scheme can improve overall spectral efficiency, particularly when the number of antennas is large.