 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePropagation Measurements and Analyses at 28 GHz via an Autonomous Beam-Steering Platform
Feb 16, 2023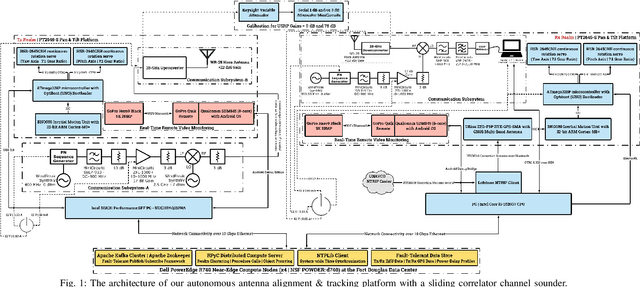

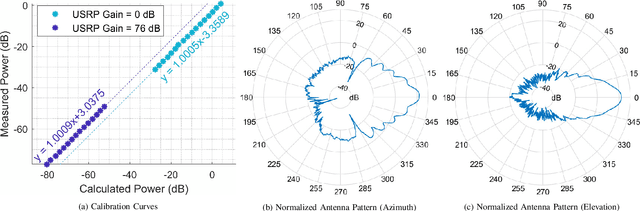

This paper details the design of an autonomous alignment and tracking platform to mechanically steer directional horn antennas in a sliding correlator channel sounder setup for 28 GHz V2X propagation modeling. A pan-and-tilt subsystem facilitates uninhibited rotational mobility along the yaw and pitch axes, driven by open-loop servo units and orchestrated via inertial motion controllers. A geo-positioning subsystem augmented in accuracy by real-time kinematics enables navigation events to be shared between a transmitter and receiver over an Apache Kafka messaging middleware framework with fault tolerance. Herein, our system demonstrates a 3D geo-positioning accuracy of 17 cm, an average principal axes positioning accuracy of 1.1 degrees, and an average tracking response time of 27.8 ms. Crucially, fully autonomous antenna alignment and tracking facilitates continuous series of measurements, a unique yet critical necessity for millimeter wave channel modeling in vehicular networks. The power-delay profiles, collected along routes spanning urban and suburban neighborhoods on the NSF POWDER testbed, are used in pathloss evaluations involving the 3GPP TR38.901 and ITU-R M.2135 standards. Empirically, we demonstrate that these models fail to accurately capture the 28 GHz pathloss behavior in urban foliage and suburban radio environments. In addition to RMS direction-spread analyses for angles-of-arrival via the SAGE algorithm, we perform signal decoherence studies wherein we derive exponential models for the spatial/angular autocorrelation coefficient under distance and alignment effects.
Multiscale Adaptive Scheduling and Path-Planning for Power-Constrained UAV-Relays via SMDPs
Sep 16, 2022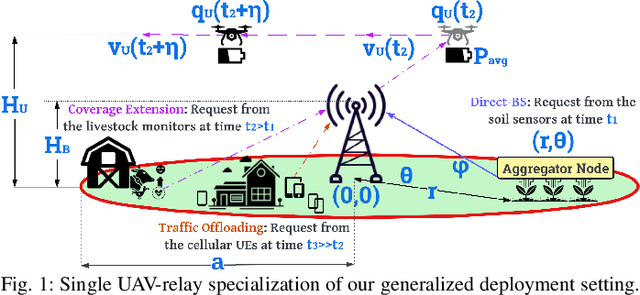
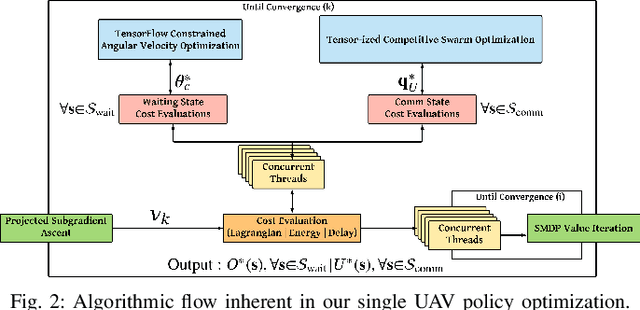


We describe the orchestration of a decentralized swarm of rotary-wing UAV-relays, augmenting the coverage and service capabilities of a terrestrial base station. Our goal is to minimize the time-average service latencies involved in handling transmission requests from ground users under Poisson arrivals, subject to an average UAV power constraint. Equipped with rate adaptation to efficiently leverage air-to-ground channel stochastics, we first derive the optimal control policy for a single relay via a semi-Markov decision process formulation, with competitive swarm optimization for UAV trajectory design. Accordingly, we detail a multiscale decomposition of this construction: outer decisions on radial wait velocities and end positions optimize the expected long-term delay-power trade-off; consequently, inner decisions on angular wait velocities, service schedules, and UAV trajectories greedily minimize the instantaneous delay-power costs. Next, generalizing to UAV swarms via replication and consensus-driven command-and-control, this policy is embedded with spread maximization and conflict resolution heuristics. We demonstrate that our framework offers superior performance vis-\`a-vis average service latencies and average per-UAV power consumption: 11x faster data payload delivery relative to static UAV-relay deployments and 2x faster than a deep-Q network solution; remarkably, one relay with our scheme outclasses three relays under a joint successive convex approximation policy by 62%.
A Robotic Antenna Alignment and Tracking System for Millimeter Wave Propagation Modeling
Oct 14, 2021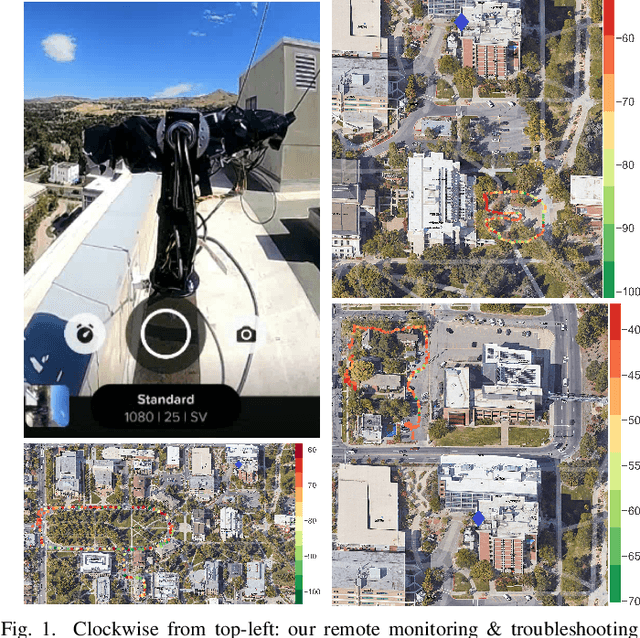

In this paper, we discuss the design of a sliding-correlator channel sounder for 28 GHz propagation modeling on the NSF POWDER testbed in Salt Lake City, UT. Beam-alignment is mechanically achieved via a fully autonomous robotic antenna tracking platform, designed using commercial off-the-shelf components. Equipped with an Apache Zookeeper/Kafka managed fault-tolerant publish-subscribe framework, we demonstrate tracking response times of 27.8 ms, in addition to superior scalability over state-of-the-art mechanical beam-steering systems. Enhanced with real-time kinematic correction streams, our geo-positioning subsystem achieves a 3D accuracy of 17 cm, while our principal axes positioning subsystem achieves an average accuracy of 1.1 degrees across yaw and pitch movements. Finally, by facilitating remote orchestration (via managed containers), uninhibited rotation (via encapsulation), and real-time positioning visualization (via Dash/MapBox), we exhibit a proven prototype well-suited for V2X measurements.
Learning-based Spectrum Sensing and Access in Cognitive Radios via Approximate POMDPs
Jul 14, 2021
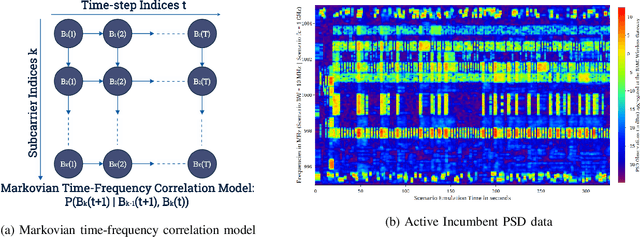


A novel LEarning-based Spectrum Sensing and Access (LESSA) framework is proposed, wherein a cognitive radio (CR) learns a time-frequency correlation model underlying spectrum occupancy of licensed users (LUs) in a radio ecosystem; concurrently, it devises an approximately optimal spectrum sensing and access policy under sensing constraints. A Baum-Welch algorithm is proposed to learn a parametric Markov transition model of LU spectrum occupancy based on noisy spectrum measurements. Spectrum sensing and access are cast as a Partially-Observable Markov Decision Process, approximately optimized via randomized point-based value iteration. Fragmentation, Hamming-distance state filters and Monte-Carlo methods are proposed to alleviate the inherent computational complexity, and a weighted reward metric to regulate the trade-off between CR throughput and LU interference. Numerical evaluations demonstrate that LESSA performs within 5 percent of a genie-aided upper bound with foreknowledge of LU spectrum occupancy, and outperforms state-of-the-art algorithms across the entire trade-off region: 71 percent over correlation-based clustering, 26 percent over Neyman-Pearson detection, 6 percent over the Viterbi algorithm, and 9 percent over an adaptive Deep Q-Network. LESSA is then extended to a distributed Multi-Agent setting (MA-LESSA), by proposing novel neighbor discovery and channel access rank allocation. MA-LESSA improves CR throughput by 43 percent over cooperative TD-SARSA, 84 percent over cooperative greedy distributed learning, and 3x over non-cooperative learning via g-statistics and ACKs. Finally, MA-LESSA is implemented on the DARPA SC2 platform, manifesting superior performance over competitors in a real-world TDWR-UNII WLAN emulation; its implementation feasibility is further validated on a testbed of ESP32 radios, exhibiting 96 percent success probability.