 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiscale Adaptive Scheduling and Path-Planning for Power-Constrained UAV-Relays via SMDPs
Paper and Code
Sep 16, 2022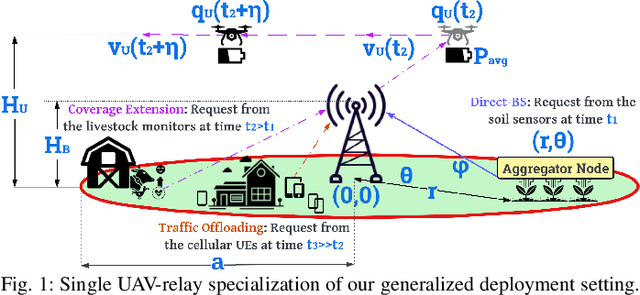
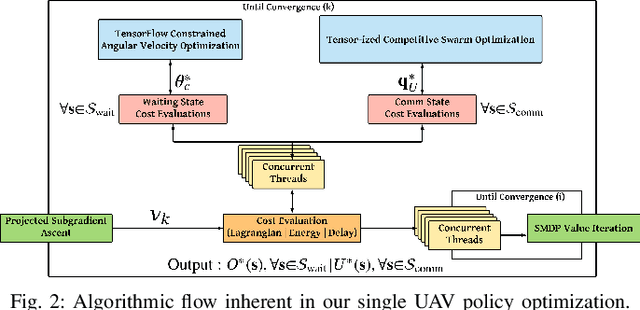


We describe the orchestration of a decentralized swarm of rotary-wing UAV-relays, augmenting the coverage and service capabilities of a terrestrial base station. Our goal is to minimize the time-average service latencies involved in handling transmission requests from ground users under Poisson arrivals, subject to an average UAV power constraint. Equipped with rate adaptation to efficiently leverage air-to-ground channel stochastics, we first derive the optimal control policy for a single relay via a semi-Markov decision process formulation, with competitive swarm optimization for UAV trajectory design. Accordingly, we detail a multiscale decomposition of this construction: outer decisions on radial wait velocities and end positions optimize the expected long-term delay-power trade-off; consequently, inner decisions on angular wait velocities, service schedules, and UAV trajectories greedily minimize the instantaneous delay-power costs. Next, generalizing to UAV swarms via replication and consensus-driven command-and-control, this policy is embedded with spread maximization and conflict resolution heuristics. We demonstrate that our framework offers superior performance vis-\`a-vis average service latencies and average per-UAV power consumption: 11x faster data payload delivery relative to static UAV-relay deployments and 2x faster than a deep-Q network solution; remarkably, one relay with our scheme outclasses three relays under a joint successive convex approximation policy by 62%.