 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertain Machine Ethics Planning
May 07, 2025Machine Ethics decisions should consider the implications of uncertainty over decisions. Decisions should be made over sequences of actions to reach preferable outcomes long term. The evaluation of outcomes, however, may invoke one or more moral theories, which might have conflicting judgements. Each theory will require differing representations of the ethical situation. For example, Utilitarianism measures numerical values, Deontology analyses duties, and Virtue Ethics emphasises moral character. While balancing potentially conflicting moral considerations, decisions may need to be made, for example, to achieve morally neutral goals with minimal costs. In this paper, we formalise the problem as a Multi-Moral Markov Decision Process and a Multi-Moral Stochastic Shortest Path Problem. We develop a heuristic algorithm based on Multi-Objective AO*, utilising Sven-Ove Hansson's Hypothetical Retrospection procedure for ethical reasoning under uncertainty. Our approach is validated by a case study from Machine Ethics literature: the problem of whether to steal insulin for someone who needs it.
Intention Recognition in Real-Time Interactive Navigation Maps
Feb 24, 2025In this demonstration, we develop IntentRec4Maps, a system to recognise users' intentions in interactive maps for real-world navigation. IntentRec4Maps uses the Google Maps Platform as the real-world interactive map, and a very effective approach for recognising users' intentions in real-time. We showcase the recognition process of IntentRec4Maps using two different Path-Planners and a Large Language Model (LLM). GitHub: https://github.com/PeijieZ/IntentRec4Maps
Goal Recognition via Linear Programming
Apr 11, 2024Goal Recognition is the task by which an observer aims to discern the goals that correspond to plans that comply with the perceived behavior of subject agents given as a sequence of observations. Research on Goal Recognition as Planning encompasses reasoning about the model of a planning task, the observations, and the goals using planning techniques, resulting in very efficient recognition approaches. In this article, we design novel recognition approaches that rely on the Operator-Counting framework, proposing new constraints, and analyze their constraints' properties both theoretically and empirically. The Operator-Counting framework is a technique that efficiently computes heuristic estimates of cost-to-goal using Integer/Linear Programming (IP/LP). In the realm of theory, we prove that the new constraints provide lower bounds on the cost of plans that comply with observations. We also provide an extensive empirical evaluation to assess how the new constraints improve the quality of the solution, and we found that they are especially informed in deciding which goals are unlikely to be part of the solution. Our novel recognition approaches have two pivotal advantages: first, they employ new IP/LP constraints for efficiently recognizing goals; second, we show how the new IP/LP constraints can improve the recognition of goals under both partial and noisy observability.
Generalising Planning Environment Redesign
Feb 14, 2024
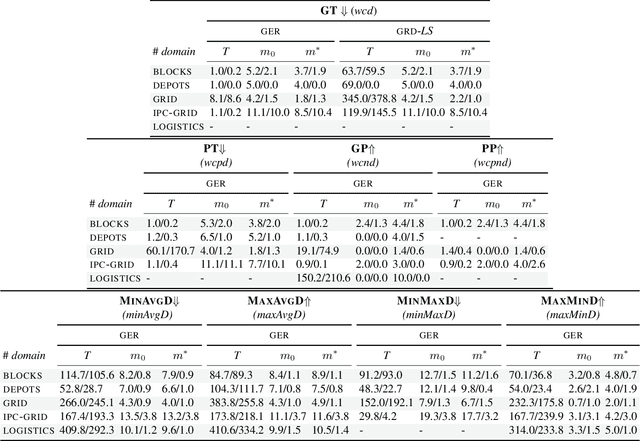

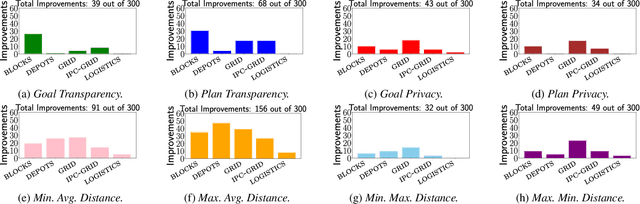
In Environment Design, one interested party seeks to affect another agent's decisions by applying changes to the environment. Most research on planning environment (re)design assumes the interested party's objective is to facilitate the recognition of goals and plans, and search over the space of environment modifications to find the minimal set of changes that simplify those tasks and optimise a particular metric. This search space is usually intractable, so existing approaches devise metric-dependent pruning techniques for performing search more efficiently. This results in approaches that are not able to generalise across different objectives and/or metrics. In this paper, we argue that the interested party could have objectives and metrics that are not necessarily related to recognising agents' goals or plans. Thus, to generalise the task of Planning Environment Redesign, we develop a general environment redesign approach that is metric-agnostic and leverages recent research on top-quality planning to efficiently redesign planning environments according to any interested party's objective and metric. Experiments over a set of environment redesign benchmarks show that our general approach outperforms existing approaches when using well-known metrics, such as facilitating the recognition of goals, as well as its effectiveness when solving environment redesign tasks that optimise a novel set of different metrics.
Temporally Extended Goal Recognition in Fully Observable Non-Deterministic Domain Models
Jun 14, 2023Goal Recognition is the task of discerning the correct intended goal that an agent aims to achieve, given a set of goal hypotheses, a domain model, and a sequence of observations (i.e., a sample of the plan executed in the environment). Existing approaches assume that goal hypotheses comprise a single conjunctive formula over a single final state and that the environment dynamics are deterministic, preventing the recognition of temporally extended goals in more complex settings. In this paper, we expand goal recognition to temporally extended goals in Fully Observable Non-Deterministic (FOND) planning domain models, focusing on goals on finite traces expressed in Linear Temporal Logic (LTLf) and Pure Past Linear Temporal Logic (PLTLf). We develop the first approach capable of recognizing goals in such settings and evaluate it using different LTLf and PLTLf goals over six FOND planning domain models. Empirical results show that our approach is accurate in recognizing temporally extended goals in different recognition settings.
Uncertain Machine Ethical Decisions Using Hypothetical Retrospection
May 02, 2023We propose the use of the hypothetical retrospection argumentation procedure, developed by Sven Hansson, to improve existing approaches to machine ethical reasoning by accounting for probability and uncertainty from a position of Philosophy that resonates with humans. Actions are represented with a branching set of potential outcomes, each with a state, utility, and either a numeric or poetic probability estimate. Actions are chosen based on comparisons between sets of arguments favouring actions from the perspective of their branches, even those branches that led to an undesirable outcome. This use of arguments allows a variety of philosophical theories for ethical reasoning to be used, potentially in flexible combination with each other. We implement the procedure, applying consequentialist and deontological ethical theories, independently and concurrently, to an autonomous library system use case. We introduce a a preliminary framework that seems to meet the varied requirements of a machine ethics system: versatility under multiple theories and a resonance with humans that enables transparency and explainability.
Iterative Depth-First Search for Fully Observable Non-Deterministic Planning
Apr 08, 2022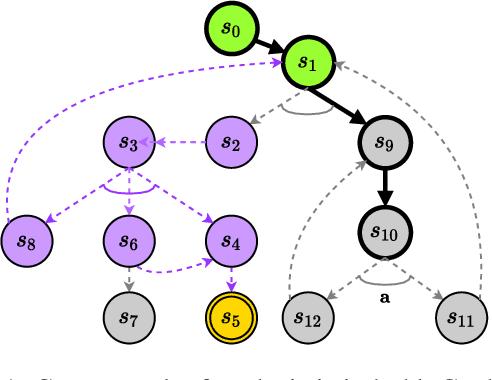
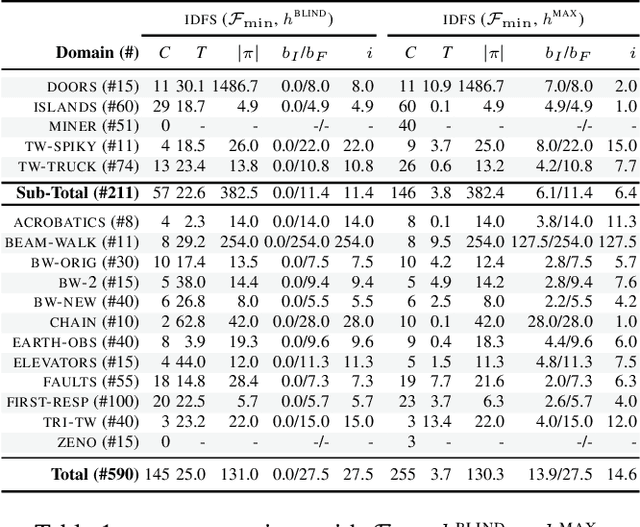
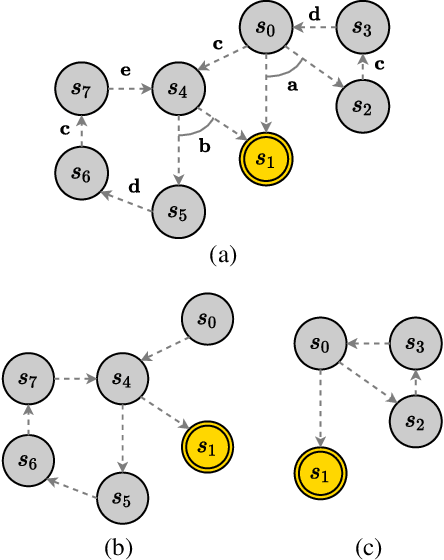
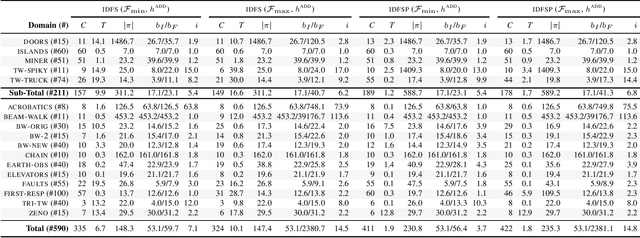
Fully Observable Non-Deterministic (FOND) planning models uncertainty through actions with non-deterministic effects. Existing FOND planning algorithms are effective and employ a wide range of techniques. However, most of the existing algorithms are not robust for dealing with both non-determinism and task size. In this paper, we develop a novel iterative depth-first search algorithm that solves FOND planning tasks and produces strong cyclic policies. Our algorithm is explicitly designed for FOND planning, addressing more directly the non-deterministic aspect of FOND planning, and it also exploits the benefits of heuristic functions to make the algorithm more effective during the iterative searching process. We compare our proposed algorithm to well-known FOND planners, and show that it has robust performance over several distinct types of FOND domains considering different metrics.
Recognizing LTLf/PLTLf Goals in Fully Observable Non-Deterministic Domain Models
Mar 22, 2021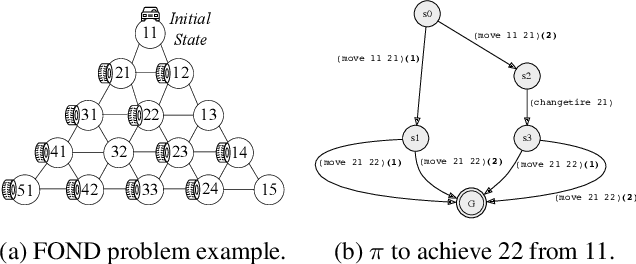
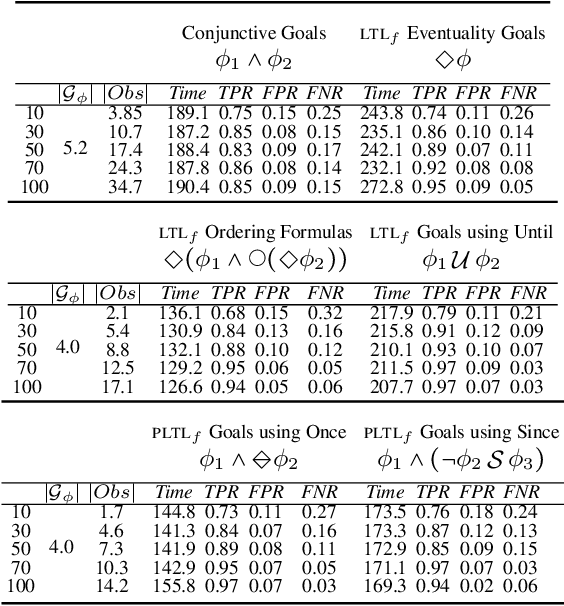
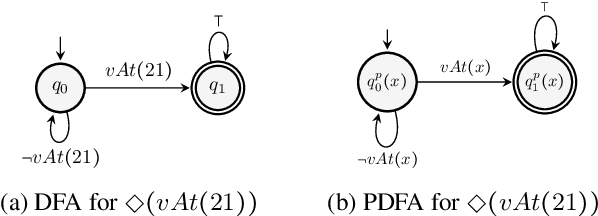
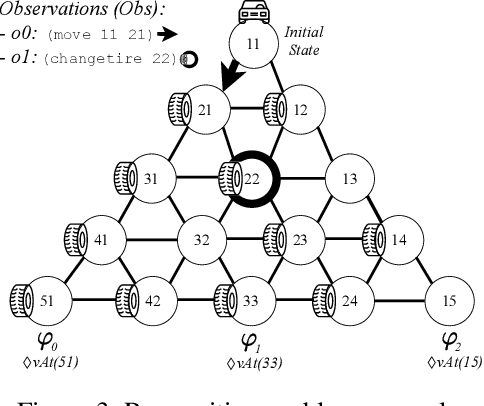
Goal Recognition is the task of discerning the correct intended goal that an agent aims to achieve, given a set of possible goals, a domain model, and a sequence of observations as a sample of the plan being executed in the environment. Existing approaches assume that the possible goals are formalized as a conjunction in deterministic settings. In this paper, we develop a novel approach that is capable of recognizing temporally extended goals in Fully Observable Non-Deterministic (FOND) planning domain models, focusing on goals on finite traces expressed in Linear Temporal Logic (LTLf) and (Pure) Past Linear Temporal Logic (PLTLf). We empirically evaluate our goal recognition approach using different LTLf and PLTLf goals over six common FOND planning domain models, and show that our approach is accurate to recognize temporally extended goals at several levels of observability.
Inferring Agents Preferences as Priors for Probabilistic Goal Recognition
Feb 23, 2021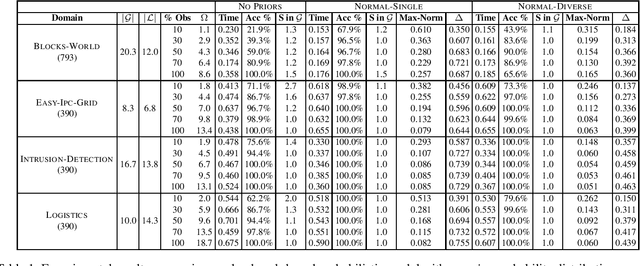
Recent approaches to goal recognition have leveraged planning landmarks to achieve high-accuracy with low runtime cost. These approaches, however, lack a probabilistic interpretation. Furthermore, while most probabilistic models to goal recognition assume that the recognizer has access to a prior probability representing, for example, an agent's preferences, virtually no goal recognition approach actually uses the prior in practice, simply assuming a uniform prior. In this paper, we provide a model to both extend landmark-based goal recognition with a probabilistic interpretation and allow the estimation of such prior probability and its usage to compute posterior probabilities after repeated interactions of observed agents. We empirically show that our model can not only recognize goals effectively but also successfully infer the correct prior probability distribution representing an agent's preferences.
Goal Recognition over Imperfect Domain Models
May 12, 2020


Goal recognition is the problem of recognizing the intended goal of autonomous agents or humans by observing their behavior in an environment. Over the past years, most existing approaches to goal and plan recognition have been ignoring the need to deal with imperfections regarding the domain model that formalizes the environment where autonomous agents behave. In this thesis, we introduce the problem of goal recognition over imperfect domain models, and develop solution approaches that explicitly deal with two distinct types of imperfect domains models: (1) incomplete discrete domain models that have possible, rather than known, preconditions and effects in action descriptions; and (2) approximate continuous domain models, where the transition function is approximated from past observations and not well-defined. We develop novel goal recognition approaches over imperfect domains models by leveraging and adapting existing recognition approaches from the literature. Experiments and evaluation over these two types of imperfect domains models show that our novel goal recognition approaches are accurate in comparison to baseline approaches from the literature, at several levels of observability and imperfections.