 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring Agents Preferences as Priors for Probabilistic Goal Recognition
Feb 23, 2021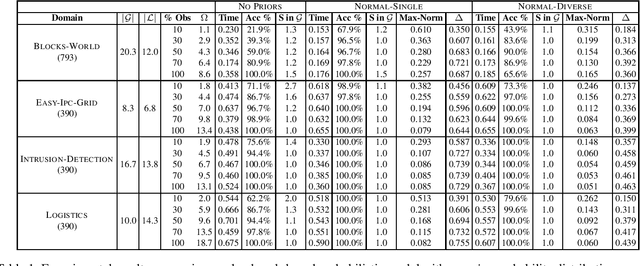
Recent approaches to goal recognition have leveraged planning landmarks to achieve high-accuracy with low runtime cost. These approaches, however, lack a probabilistic interpretation. Furthermore, while most probabilistic models to goal recognition assume that the recognizer has access to a prior probability representing, for example, an agent's preferences, virtually no goal recognition approach actually uses the prior in practice, simply assuming a uniform prior. In this paper, we provide a model to both extend landmark-based goal recognition with a probabilistic interpretation and allow the estimation of such prior probability and its usage to compute posterior probabilities after repeated interactions of observed agents. We empirically show that our model can not only recognize goals effectively but also successfully infer the correct prior probability distribution representing an agent's preferences.