 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporally Extended Goal Recognition in Fully Observable Non-Deterministic Domain Models
Jun 14, 2023Goal Recognition is the task of discerning the correct intended goal that an agent aims to achieve, given a set of goal hypotheses, a domain model, and a sequence of observations (i.e., a sample of the plan executed in the environment). Existing approaches assume that goal hypotheses comprise a single conjunctive formula over a single final state and that the environment dynamics are deterministic, preventing the recognition of temporally extended goals in more complex settings. In this paper, we expand goal recognition to temporally extended goals in Fully Observable Non-Deterministic (FOND) planning domain models, focusing on goals on finite traces expressed in Linear Temporal Logic (LTLf) and Pure Past Linear Temporal Logic (PLTLf). We develop the first approach capable of recognizing goals in such settings and evaluate it using different LTLf and PLTLf goals over six FOND planning domain models. Empirical results show that our approach is accurate in recognizing temporally extended goals in different recognition settings.
Planning for Temporally Extended Goals in Pure-Past Linear Temporal Logic: A Polynomial Reduction to Standard Planning
Apr 22, 2022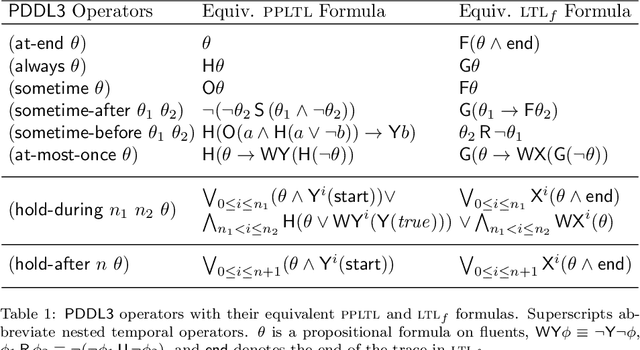
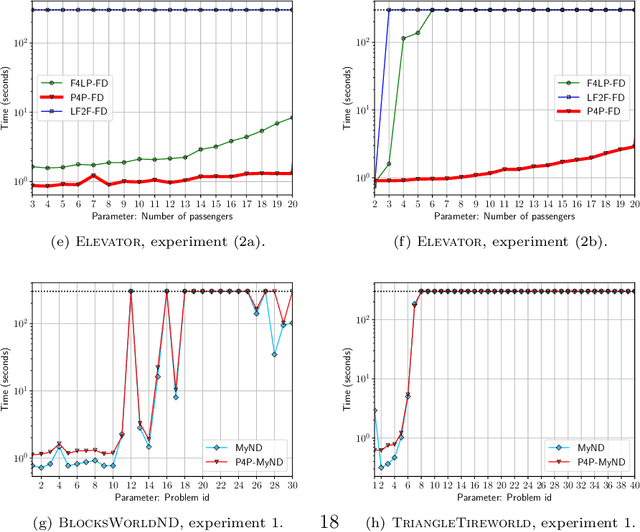
We study temporally extended goals expressed in Pure-Past LTL (PPLTL). PPLTL is particularly interesting for expressing goals since it allows to express sophisticated tasks as in the Formal Methods literature, while the worst-case computational complexity of Planning in both deterministic and nondeterministic domains (FOND) remains the same as for classical reachability goals. However, while the theory of planning for PPLTL goals is well understood, practical tools have not been specifically investigated. In this paper, we make a significant leap forward in the construction of actual tools to handle PPLTL goals. We devise a technique to polynomially translate planning for PPLTL goals into standard planning. We show the formal correctness of the translation, its complexity, and its practical effectiveness through some comparative experiments. As a result, our translation enables state-of-the-art tools, such as FD or MyND, to handle PPLTL goals seamlessly, maintaining the impressive performances they have for classical reachability goals.
Recognizing LTLf/PLTLf Goals in Fully Observable Non-Deterministic Domain Models
Mar 22, 2021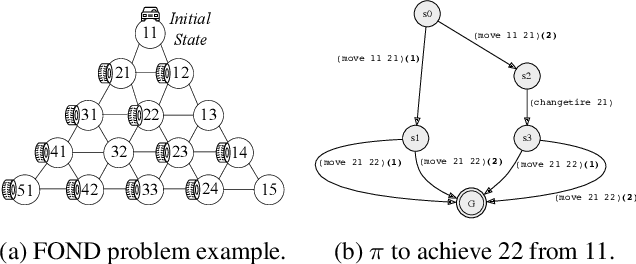
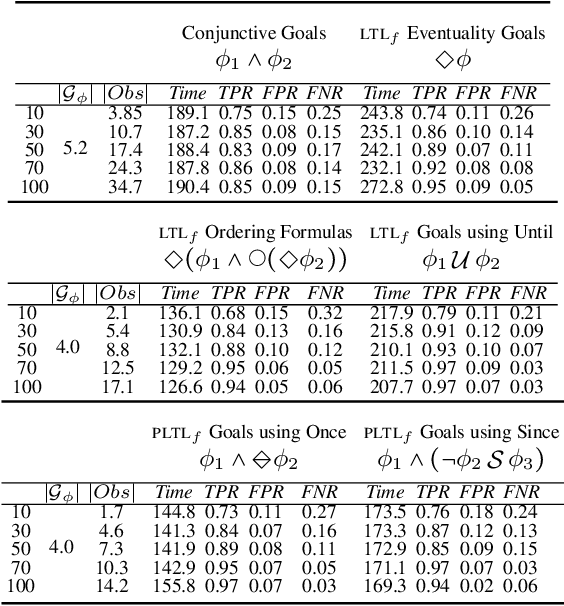
Goal Recognition is the task of discerning the correct intended goal that an agent aims to achieve, given a set of possible goals, a domain model, and a sequence of observations as a sample of the plan being executed in the environment. Existing approaches assume that the possible goals are formalized as a conjunction in deterministic settings. In this paper, we develop a novel approach that is capable of recognizing temporally extended goals in Fully Observable Non-Deterministic (FOND) planning domain models, focusing on goals on finite traces expressed in Linear Temporal Logic (LTLf) and (Pure) Past Linear Temporal Logic (PLTLf). We empirically evaluate our goal recognition approach using different LTLf and PLTLf goals over six common FOND planning domain models, and show that our approach is accurate to recognize temporally extended goals at several levels of observability.
FOND Planning for LTLf and PLTLf Goals
Apr 15, 2020
In this report, we will define a new approach to the problem of non deterministic planning for extended temporal goals. In particular, we will give a solution to this problem reducing it to a fully observable non deterministic (FOND) planning problem and taking advantage of the LTLfToDFA tool. First of all, we will introduce the main idea and motivations supporting our approach. Then, we will give some preliminaries explaining the Planning Domain Definition Language (PDDL) language and the FOND planning problem formally. After that, we will illustrate our FOND4LTLfPLTLf (also available online) approach with the encoding of temporal goals into a PDDL domain and problem. Finally, we will present some of the results obtained through the application of the proposed solution.