 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Continuous Assurance with Formal Verification and Assurance Cases
Nov 17, 2025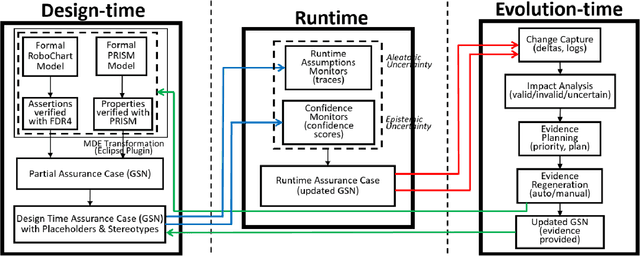
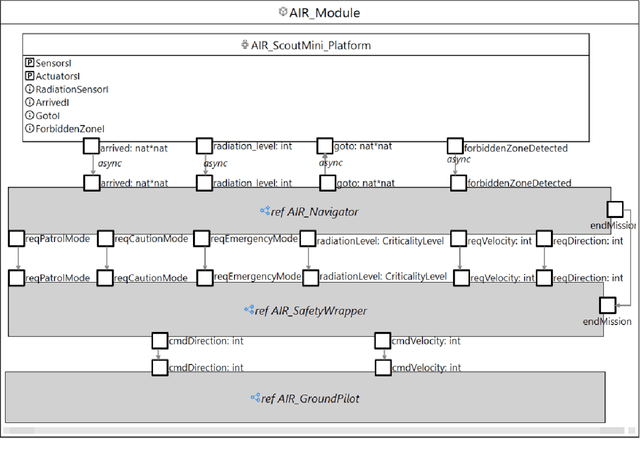
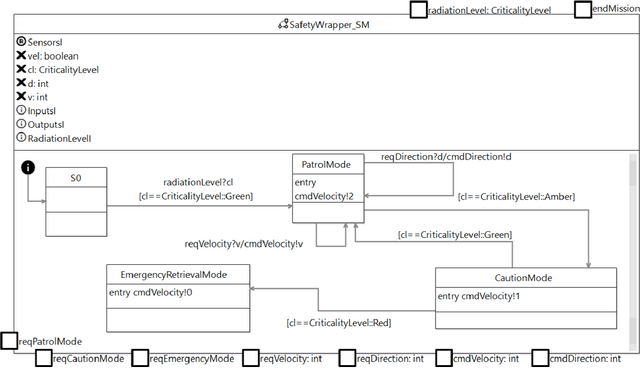
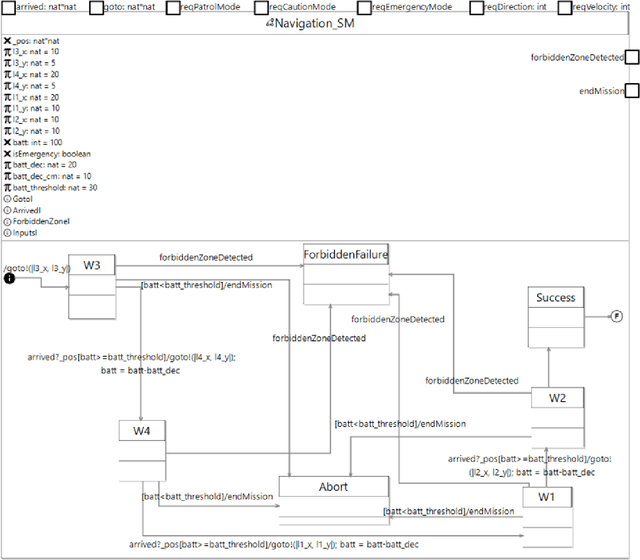
Autonomous systems must sustain justified confidence in their correctness and safety across their operational lifecycle-from design and deployment through post-deployment evolution. Traditional assurance methods often separate development-time assurance from runtime assurance, yielding fragmented arguments that cannot adapt to runtime changes or system updates - a significant challenge for assured autonomy. Towards addressing this, we propose a unified Continuous Assurance Framework that integrates design-time, runtime, and evolution-time assurance within a traceable, model-driven workflow as a step towards assured autonomy. In this paper, we specifically instantiate the design-time phase of the framework using two formal verification methods: RoboChart for functional correctness and PRISM for probabilistic risk analysis. We also propose a model-driven transformation pipeline, implemented as an Eclipse plugin, that automatically regenerates structured assurance arguments whenever formal specifications or their verification results change, thereby ensuring traceability. We demonstrate our approach on a nuclear inspection robot scenario, and discuss its alignment with the Trilateral AI Principles, reflecting regulator-endorsed best practices.
Autonomy and Safety Assurance in the Early Development of Robotics and Autonomous Systems
Jan 30, 2025
This report provides an overview of the workshop titled Autonomy and Safety Assurance in the Early Development of Robotics and Autonomous Systems, hosted by the Centre for Robotic Autonomy in Demanding and Long-Lasting Environments (CRADLE) on September 2, 2024, at The University of Manchester, UK. The event brought together representatives from six regulatory and assurance bodies across diverse sectors to discuss challenges and evidence for ensuring the safety of autonomous and robotic systems, particularly autonomous inspection robots (AIR). The workshop featured six invited talks by the regulatory and assurance bodies. CRADLE aims to make assurance an integral part of engineering reliable, transparent, and trustworthy autonomous systems. Key discussions revolved around three research questions: (i) challenges in assuring safety for AIR; (ii) evidence for safety assurance; and (iii) how assurance cases need to differ for autonomous systems. Following the invited talks, the breakout groups further discussed the research questions using case studies from ground (rail), nuclear, underwater, and drone-based AIR. This workshop offered a valuable opportunity for representatives from industry, academia, and regulatory bodies to discuss challenges related to assured autonomy. Feedback from participants indicated a strong willingness to adopt a design-for-assurance process to ensure that robots are developed and verified to meet regulatory expectations.
A Multi-Level Corroborative Approach for Verification and Validation of Autonomous Robotic Swarms
Jul 22, 2024Modelling and characterizing emergent behaviour within a swarm can pose significant challenges in terms of 'assurance'. Assurance tasks encompass adherence to standards, certification processes, and the execution of verification and validation (V&V) methods, such as model checking. In this study, we propose a holistic, multi-level modelling approach for formally verifying and validating autonomous robotic swarms, which are defined at the macroscopic formal modelling, low-fidelity simulation, high-fidelity simulation, and real-robot levels. Our formal macroscopic models, used for verification, are characterized by data derived from actual simulations, ensuring both accuracy and traceability across different system models. Furthermore, our work combines formal verification with experimental validation involving real robots. In this way, our corroborative approach for V&V seeks to enhance confidence in the evidence, in contrast to employing these methods separately. We explore our approach through a case study focused on a swarm of robots operating within a public cloakroom.
Soft Gripping: Specifying for Trustworthiness
Jul 03, 2023


Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
Assessing Trustworthiness of Autonomous Systems
May 11, 2023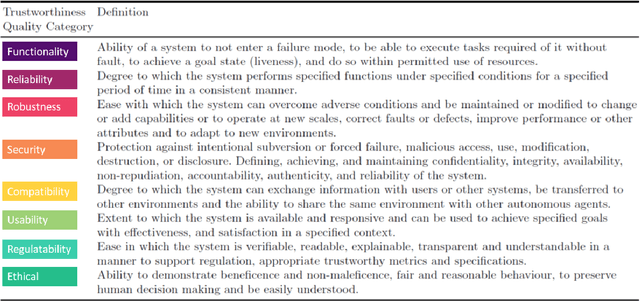
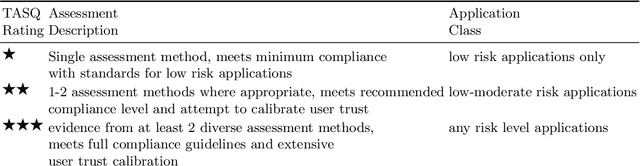
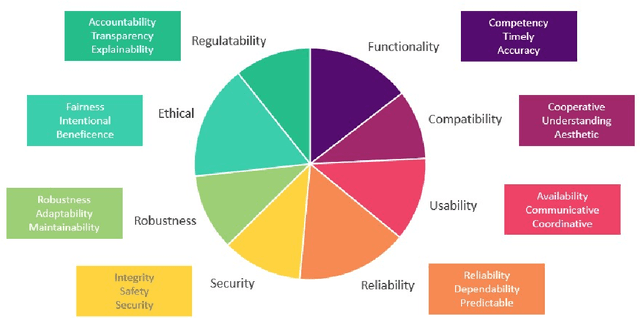
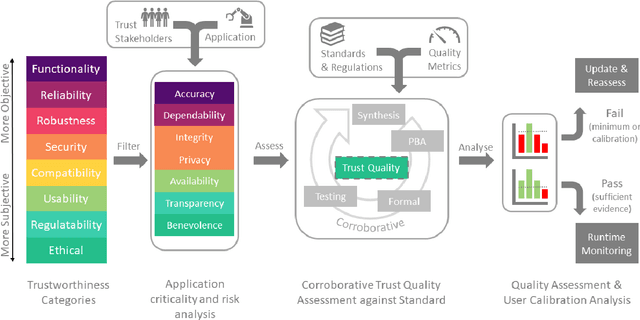
As Autonomous Systems (AS) become more ubiquitous in society, more responsible for our safety and our interaction with them more frequent, it is essential that they are trustworthy. Assessing the trustworthiness of AS is a mandatory challenge for the verification and development community. This will require appropriate standards and suitable metrics that may serve to objectively and comparatively judge trustworthiness of AS across the broad range of current and future applications. The meta-expression `trustworthiness' is examined in the context of AS capturing the relevant qualities that comprise this term in the literature. Recent developments in standards and frameworks that support assurance of autonomous systems are reviewed. A list of key challenges are identified for the community and we present an outline of a process that can be used as a trustworthiness assessment framework for AS.
AERoS: Assurance of Emergent Behaviour in Autonomous Robotic Swarms
Feb 20, 2023The behaviours of a swarm are not explicitly engineered. Instead, they are an emergent consequence of the interactions of individual agents with each other and their environment. This emergent functionality poses a challenge to safety assurance. The main contribution of this paper is a process for the safety assurance of emergent behaviour in autonomous robotic swarms called AERoS, following the guidance on the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). We explore our proposed process using a case study centred on a robot swarm operating a public cloakroom.
On Specifying for Trustworthiness
Jun 22, 2022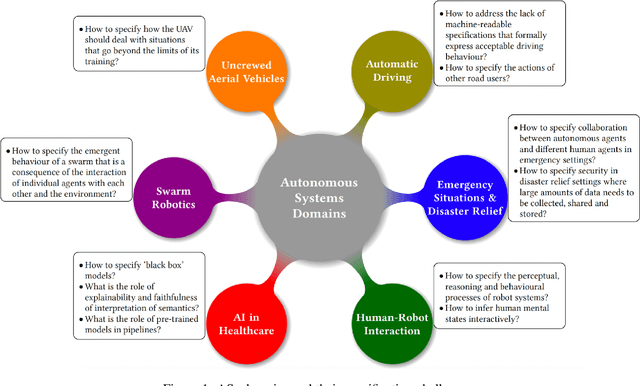

As autonomous systems are becoming part of our daily lives, ensuring their trustworthiness is crucial. There are a number of techniques for demonstrating trustworthiness. Common to all these techniques is the need to articulate specifications. In this paper, we take a broad view of specification, concentrating on top-level requirements including but not limited to functionality, safety, security and other non-functional properties. The main contribution of this article is a set of high-level intellectual challenges for the autonomous systems community related to specifying for trustworthiness. We also describe unique specification challenges concerning a number of application domains for autonomous systems.