 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Reinforcement Learning for Mobile Manipulation
Mar 04, 2026For robots to successfully transition from lab settings to everyday environments, they must begin to reason about the risks associated with their actions and make informed, risk-aware decisions. This is particularly true for robots performing mobile manipulation tasks, which involve both interacting with and navigating within dynamic, unstructured spaces. However, existing whole-body controllers for mobile manipulators typically lack explicit mechanisms for risk-sensitive decision-making under uncertainty. To our knowledge, we are the first to (i) learn risk-aware visuomotor policies for mobile manipulation conditioned on egocentric depth observations with runtime-adjustable risk sensitivity, and (ii) show risk-aware behaviours can be transferred through Imitation Learning (IL) to a visuomotor policy conditioned on egocentric depth observations. Our method achieves this by first training a privileged teacher policy using Distributional Reinforcement Learning (DRL), with a risk-neutral distributional critic. Distortion risk-metrics are then applied to the critic's predicted return distribution to calculate risk-adjusted advantage estimates used in policy updates to achieve a range of risk-aware behaviours. We then distil teacher policies with IL to obtain risk-aware student policies conditioned on egocentric depth observations. We perform extensive evaluations demonstrating that our trained visuomotor policies exhibit risk-aware behaviour (specifically achieving better worst-case performance) while performing reactive whole-body motions in unmapped environments, leveraging live depth observations for perception.
Multiple-input, multiple-output modal testing of a Hawk T1A aircraft: A new full-scale dataset for structural health monitoring
Jun 07, 2024



The use of measured vibration data from structures has a long history of enabling the development of methods for inference and monitoring. In particular, applications based on system identification and structural health monitoring have risen to prominence over recent decades and promise significant benefits when implemented in practice. However, significant challenges remain in the development of these methods. The introduction of realistic, full-scale datasets will be an important contribution to overcoming these challenges. This paper presents a new benchmark dataset capturing the dynamic response of a decommissioned BAE Systems Hawk T1A. The dataset reflects the behaviour of a complex structure with a history of service that can still be tested in controlled laboratory conditions, using a variety of known loading and damage simulation conditions. As such, it provides a key stepping stone between simple laboratory test structures and in-service structures. In this paper, the Hawk structure is described in detail, alongside a comprehensive summary of the experimental work undertaken. Following this, key descriptive highlights of the dataset are presented, before a discussion of the research challenges that the data present. Using the dataset, non-linearity in the structure is demonstrated, as well as the sensitivity of the structure to damage of different types. The dataset is highly applicable to many academic enquiries and additional analysis techniques which will enable further advancement of vibration-based engineering techniques.
AERoS: Assurance of Emergent Behaviour in Autonomous Robotic Swarms
Feb 20, 2023The behaviours of a swarm are not explicitly engineered. Instead, they are an emergent consequence of the interactions of individual agents with each other and their environment. This emergent functionality poses a challenge to safety assurance. The main contribution of this paper is a process for the safety assurance of emergent behaviour in autonomous robotic swarms called AERoS, following the guidance on the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). We explore our proposed process using a case study centred on a robot swarm operating a public cloakroom.
On Specifying for Trustworthiness
Jun 22, 2022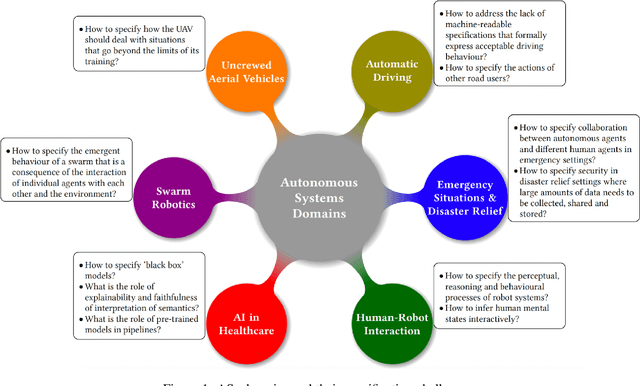

As autonomous systems are becoming part of our daily lives, ensuring their trustworthiness is crucial. There are a number of techniques for demonstrating trustworthiness. Common to all these techniques is the need to articulate specifications. In this paper, we take a broad view of specification, concentrating on top-level requirements including but not limited to functionality, safety, security and other non-functional properties. The main contribution of this article is a set of high-level intellectual challenges for the autonomous systems community related to specifying for trustworthiness. We also describe unique specification challenges concerning a number of application domains for autonomous systems.
SMARRT: Self-Repairing Motion-Reactive Anytime RRT for Dynamic Environments
Sep 10, 2021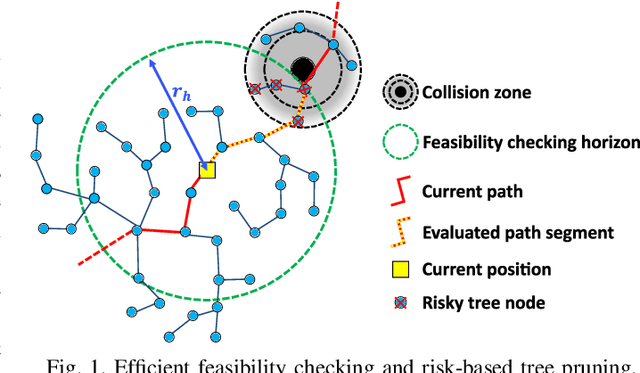
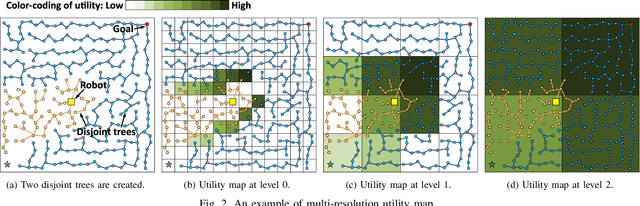
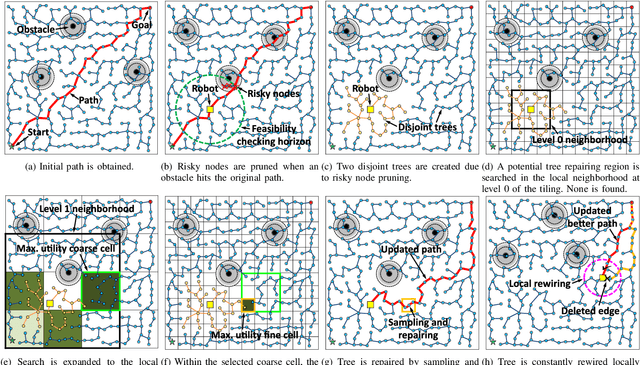
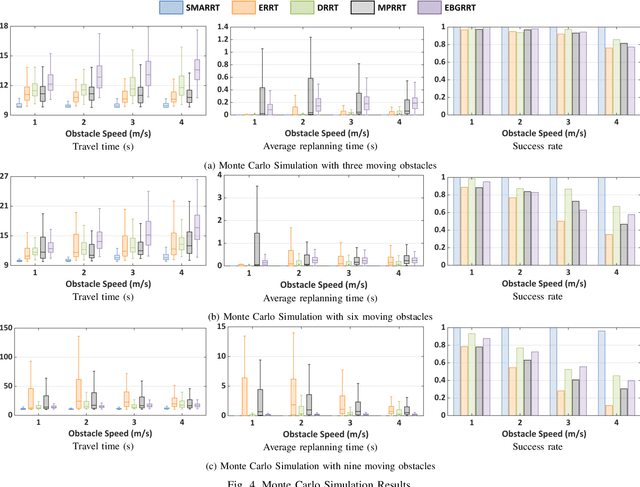
This paper addresses the fast replanning problem in dynamic environments with moving obstacles. Since for randomly moving obstacles the future states are unpredictable, the proposed method, called SMARRT, reacts to obstacle motions and revises the path in real-time based on the current interfering obstacle state (i.e., position and velocity). SMARRT is fast and efficient and performs collision checking only on the partial path segment close to the robot within a feasibility checking horizon. If the path is infeasible, then tree parts associated with the path inside the horizon are pruned while maintaining the maximal tree structure of already-explored regions. Then, a multi-resolution utility map is created to capture the environmental information used to compute the replanning utility for each cell on the multi-scale tiling. A hierarchical searching method is applied on the map to find the sampling cell efficiently. Finally, uniform samples are drawn within the sampling cell for fast replanning. The SMARRT method is validated via simulation runs, and the results are evaluated in comparison to four existing methods. The SMARRT method yields significant improvements in travel time, replanning time, and success rate compared against the existing methods.
Functional Map of the World
Apr 13, 2018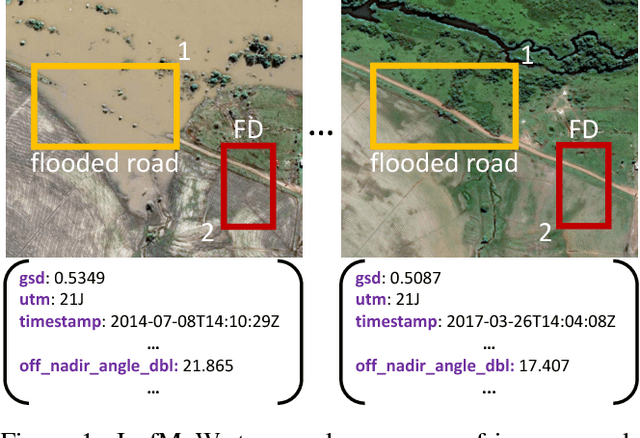
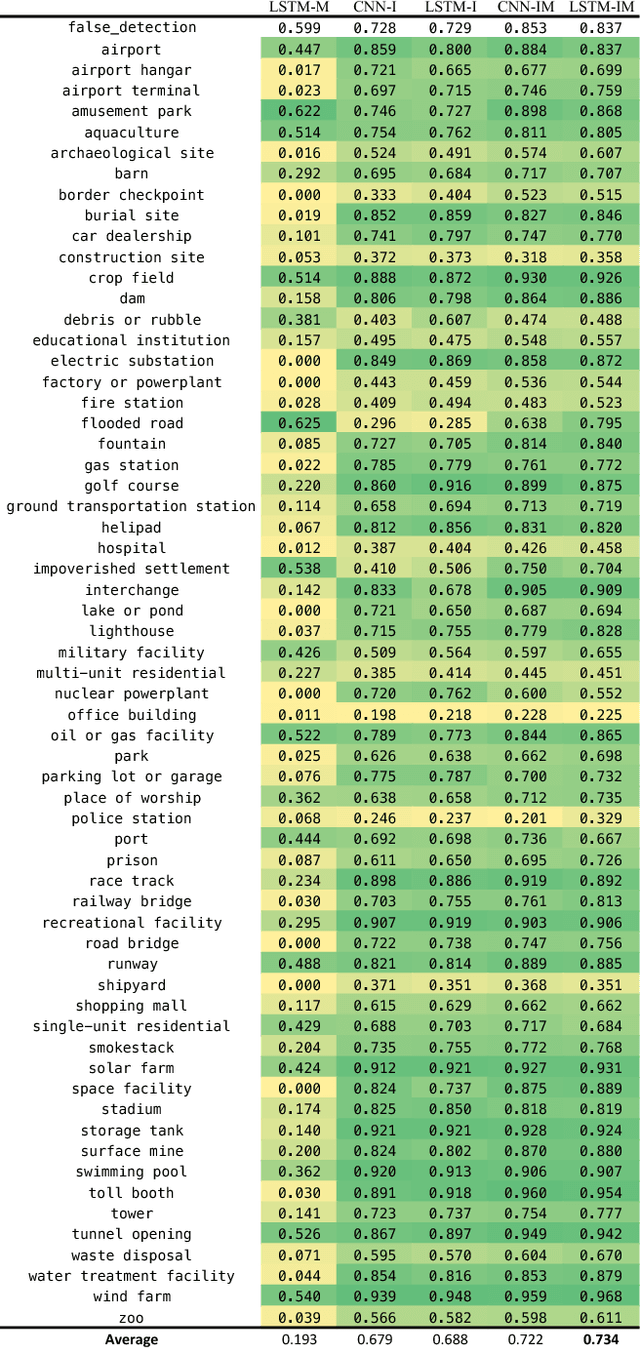
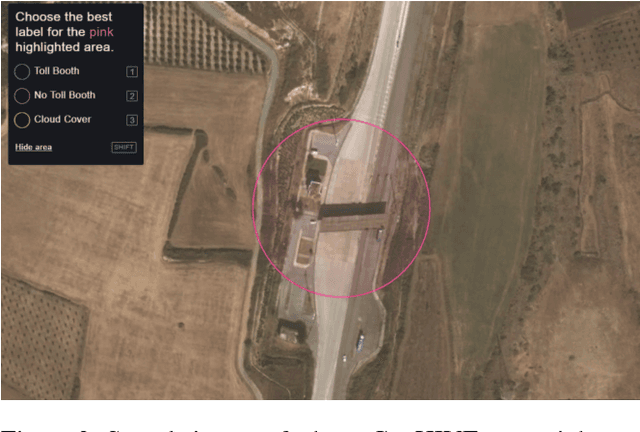
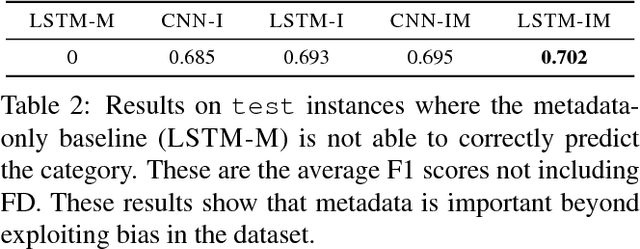
We present a new dataset, Functional Map of the World (fMoW), which aims to inspire the development of machine learning models capable of predicting the functional purpose of buildings and land use from temporal sequences of satellite images and a rich set of metadata features. The metadata provided with each image enables reasoning about location, time, sun angles, physical sizes, and other features when making predictions about objects in the image. Our dataset consists of over 1 million images from over 200 countries. For each image, we provide at least one bounding box annotation containing one of 63 categories, including a "false detection" category. We present an analysis of the dataset along with baseline approaches that reason about metadata and temporal views. Our data, code, and pretrained models have been made publicly available.