 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudo-Random UAV Test Generation Using Low-Fidelity Path Simulator
Mar 31, 2025Simulation-based testing provides a safe and cost-effective environment for verifying the safety of Uncrewed Aerial Vehicles (UAVs). However, simulation can be resource-consuming, especially when High-Fidelity Simulators (HFS) are used. To optimise simulation resources, we propose a pseudo-random test generator that uses a Low-Fidelity Simulator (LFS) to estimate UAV flight paths. This work simplifies the PX4 autopilot HFS to develop a LFS, which operates one order of magnitude faster than the HFS.Test cases predicted to cause safety violations in the LFS are subsequently validated using the HFS.
A Multi-Level Corroborative Approach for Verification and Validation of Autonomous Robotic Swarms
Jul 22, 2024Modelling and characterizing emergent behaviour within a swarm can pose significant challenges in terms of 'assurance'. Assurance tasks encompass adherence to standards, certification processes, and the execution of verification and validation (V&V) methods, such as model checking. In this study, we propose a holistic, multi-level modelling approach for formally verifying and validating autonomous robotic swarms, which are defined at the macroscopic formal modelling, low-fidelity simulation, high-fidelity simulation, and real-robot levels. Our formal macroscopic models, used for verification, are characterized by data derived from actual simulations, ensuring both accuracy and traceability across different system models. Furthermore, our work combines formal verification with experimental validation involving real robots. In this way, our corroborative approach for V&V seeks to enhance confidence in the evidence, in contrast to employing these methods separately. We explore our approach through a case study focused on a swarm of robots operating within a public cloakroom.
Detecting Stimuli with Novel Temporal Patterns to Accelerate Functional Coverage Closure
Jun 19, 2024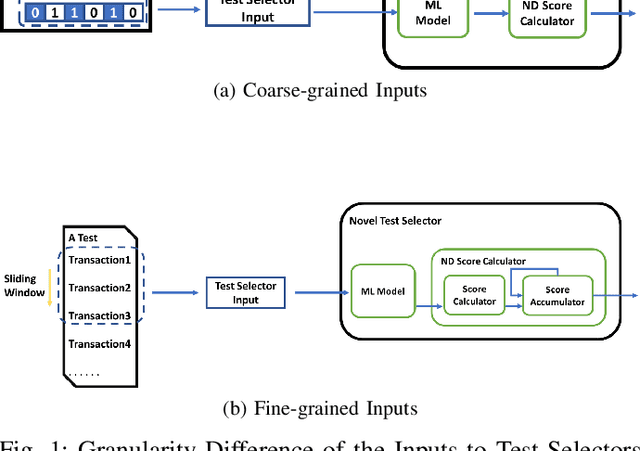
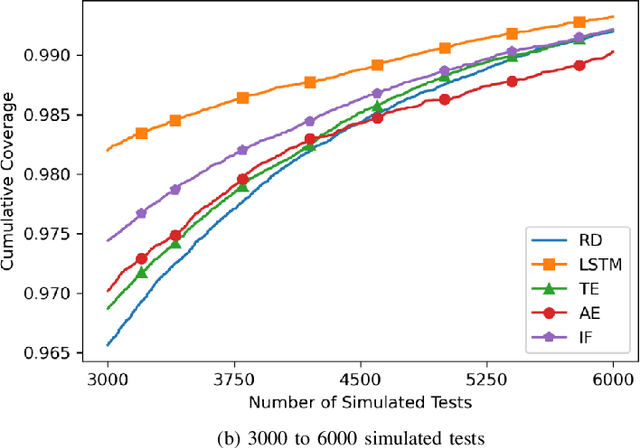
Novel test selectors have demonstrated their effectiveness in accelerating the closure of functional coverage for various industrial digital designs in simulation-based verification. The primary advantages of these test selectors include performance that is not impacted by coverage holes, straightforward implementation, and relatively low computational expense. However, the detection of stimuli with novel temporal patterns remains largely unexplored. This paper introduces two novel test selectors designed to identify such stimuli. The experiments reveal that both test selectors can accelerate the functional coverage for a commercial bus bridge, compared to random test selection. Specifically, one selector achieves a 26.9\% reduction in the number of simulated tests required to reach 98.5\% coverage, outperforming the savings achieved by two previously published test selectors by factors of 13 and 2.68, respectively.
On the Design of Human-Robot Collaboration Gestures
Feb 29, 2024
Effective communication between humans and collaborative robots is essential for seamless Human-Robot Collaboration (HRC). In noisy industrial settings, nonverbal communication, such as gestures, plays a key role in conveying commands and information to robots efficiently. While existing literature has thoroughly examined gesture recognition and robots' responses to these gestures, there is a notable gap in exploring the design of these gestures. The criteria for creating efficient HRC gestures are scattered across numerous studies. This paper surveys the design principles of HRC gestures, as contained in the literature, aiming to consolidate a set of criteria for HRC gesture design. It also examines the methods used for designing and evaluating HRC gestures to highlight research gaps and present directions for future research in this area.
On Self-Supervised Dynamic Incremental Regularised Adaptation
Nov 13, 2023



In this paper, we overview a recent method for dynamic domain adaptation named DIRA, which relies on a few samples in addition to a regularisation approach named elastic weight consolidation to achieve state-of-the-art (SOTA) domain adaptation results. DIRA has been previously shown to perform competitively with SOTA unsupervised adaption techniques. However, a limitation of DIRA is that it relies on labels to be provided for the few samples used in adaption. This makes it a supervised technique. In this paper, we discuss a proposed alteration to the DIRA method to make it self-supervised i.e. remove the need for providing labels. Experiments on our proposed alteration will be provided in future work.
Soft Gripping: Specifying for Trustworthiness
Jul 03, 2023


Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
Evaluation Metrics for CNNs Compression
May 18, 2023There is a lot of research effort devoted by researcher into developing different techniques for neural networks compression, yet the community seems to lack standardised ways of evaluating and comparing between different compression techniques, which is key to identifying the most suitable compression technique for different applications. In this paper we contribute towards standardisation of neural network compression by providing a review of evaluation metrics. These metrics have been implemented into NetZIP, a standardised neural network compression bench. We showcase some of the metrics reviewed using three case studies focusing on object classification, object detection, and edge devices.
Assessing Trustworthiness of Autonomous Systems
May 11, 2023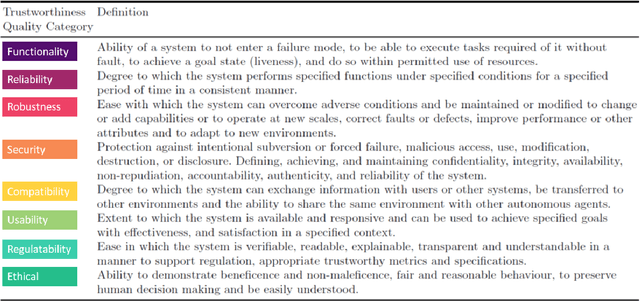
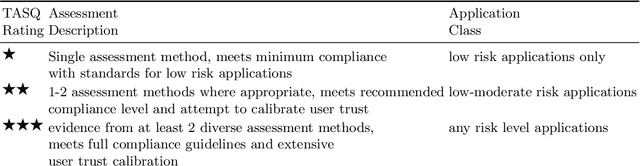
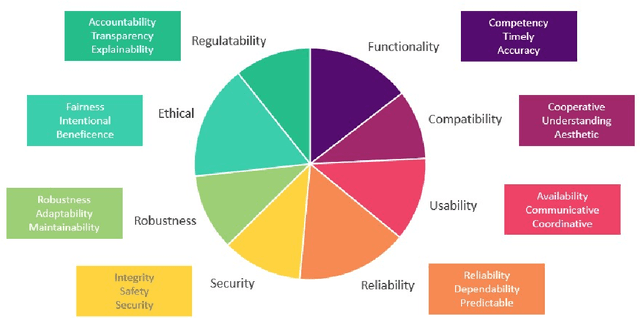
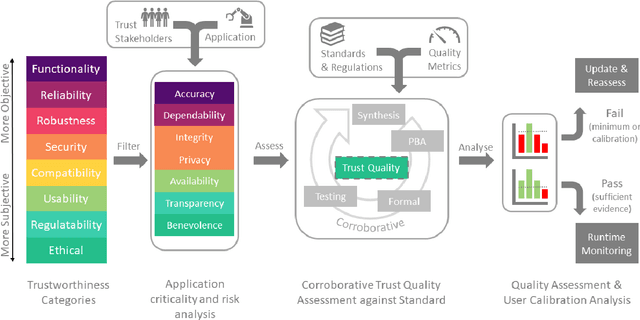
As Autonomous Systems (AS) become more ubiquitous in society, more responsible for our safety and our interaction with them more frequent, it is essential that they are trustworthy. Assessing the trustworthiness of AS is a mandatory challenge for the verification and development community. This will require appropriate standards and suitable metrics that may serve to objectively and comparatively judge trustworthiness of AS across the broad range of current and future applications. The meta-expression `trustworthiness' is examined in the context of AS capturing the relevant qualities that comprise this term in the literature. Recent developments in standards and frameworks that support assurance of autonomous systems are reviewed. A list of key challenges are identified for the community and we present an outline of a process that can be used as a trustworthiness assessment framework for AS.
AERoS: Assurance of Emergent Behaviour in Autonomous Robotic Swarms
Feb 20, 2023The behaviours of a swarm are not explicitly engineered. Instead, they are an emergent consequence of the interactions of individual agents with each other and their environment. This emergent functionality poses a challenge to safety assurance. The main contribution of this paper is a process for the safety assurance of emergent behaviour in autonomous robotic swarms called AERoS, following the guidance on the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). We explore our proposed process using a case study centred on a robot swarm operating a public cloakroom.
Towards a Measure of Trustworthiness to Evaluate CNNs During Operation
Jan 21, 2023



Due to black box nature of Convolutional neural networks (CNNs), the continuous validation of CNN classifiers' during operation is infeasible. As a result this makes it difficult for developers or regulators to gain confidence in the deployment of autonomous systems employing CNNs. We introduce the trustworthiness in classification score (TCS), a metric to assist with overcoming this challenge. The metric quantifies the trustworthiness in a prediction by checking for the existence of certain features in the predictions made by the CNN. A case study on persons detection is used to to demonstrate our method and the usage of TCS.