 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Spatial Awareness for Robot Swarms
Nov 11, 2024



Building a distributed spatial awareness within a swarm of locally sensing and communicating robots enables new swarm algorithms. We use local observations by robots of each other and Gaussian Belief Propagation message passing combined with continuous swarm movement to build a global and distributed swarm-centric frame of reference. With low bandwidth and computation requirements, this shared reference frame allows new swarm algorithms. We characterise the system in simulation and demonstrate two example algorithms.
A Multi-Level Corroborative Approach for Verification and Validation of Autonomous Robotic Swarms
Jul 22, 2024Modelling and characterizing emergent behaviour within a swarm can pose significant challenges in terms of 'assurance'. Assurance tasks encompass adherence to standards, certification processes, and the execution of verification and validation (V&V) methods, such as model checking. In this study, we propose a holistic, multi-level modelling approach for formally verifying and validating autonomous robotic swarms, which are defined at the macroscopic formal modelling, low-fidelity simulation, high-fidelity simulation, and real-robot levels. Our formal macroscopic models, used for verification, are characterized by data derived from actual simulations, ensuring both accuracy and traceability across different system models. Furthermore, our work combines formal verification with experimental validation involving real robots. In this way, our corroborative approach for V&V seeks to enhance confidence in the evidence, in contrast to employing these methods separately. We explore our approach through a case study focused on a swarm of robots operating within a public cloakroom.
TacMMs: Tactile Mobile Manipulators for Warehouse Automation
Jun 29, 2023



Multi-robot platforms are playing an increasingly important role in warehouse automation for efficient goods transport. This paper proposes a novel customization of a multi-robot system, called Tactile Mobile Manipulators (TacMMs). Each TacMM integrates a soft optical tactile sensor and a mobile robot with a load-lifting mechanism, enabling cooperative transportation in tasks requiring coordinated physical interaction. More specifically, we mount the TacTip (biomimetic optical tactile sensor) on the Distributed Organisation and Transport System (DOTS) mobile robot. The tactile information then helps the mobile robots adjust the relative robot-object pose, thereby increasing the efficiency of load-lifting tasks. This study compares the performance of using two TacMMs with tactile perception with traditional vision-based pose adjustment for load-lifting. The results show that the average success rate of the TacMMs (66%) is improved over a purely visual-based method (34%), with a larger improvement when the mass of the load was non-uniformly distributed. Although this initial study considers two TacMMs, we expect the benefits of tactile perception to extend to multiple mobile robots. Website: https://sites.google.com/view/tacmms
DOTS: An Open Testbed for Industrial Swarm Robotic Solutions
Mar 25, 2022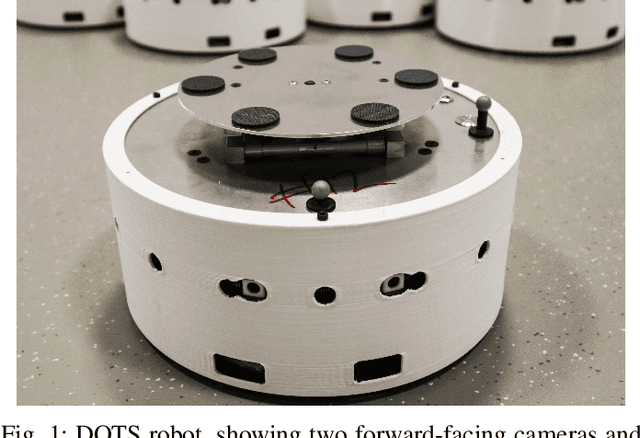
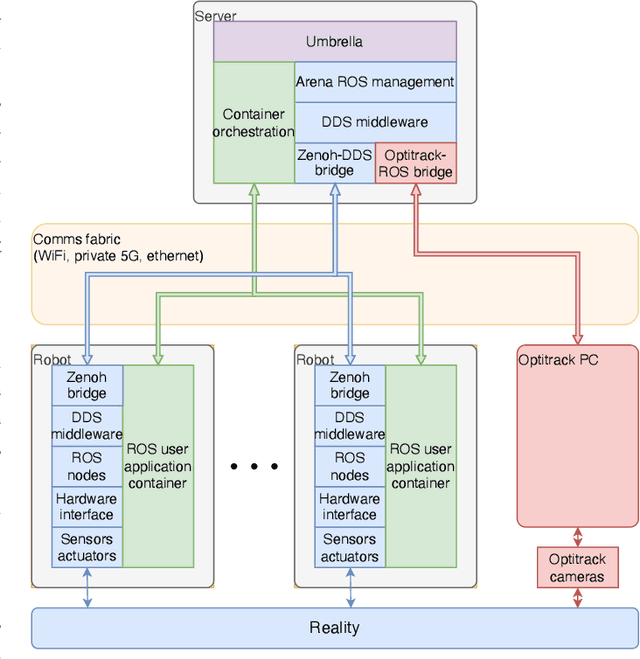

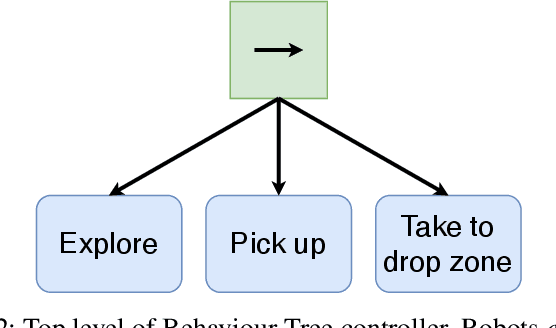
We present DOTS, a new open access testbed for industrial swarm robotics experimentation. It consists of 20 fast agile robots with high sensing and computational performance, and real-world payload capability. They are housed in an arena equipped with private 5G, motion capture, multiple cameras, and openly accessible via an online portal. We reduce barriers to entry by providing a complete platform-agnostic pipeline to develop, simulate, and deploy experimental applications to the swarm. We showcase the testbed capabilities with a swarm logistics application, autonomously and reliably searching for and retrieving multiple cargo carriers.