 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniForce: A Unified Latent Force Model for Robot Manipulation with Diverse Tactile Sensors
Feb 01, 2026Force sensing is essential for dexterous robot manipulation, but scaling force-aware policy learning is hindered by the heterogeneity of tactile sensors. Differences in sensing principles (e.g., optical vs. magnetic), form factors, and materials typically require sensor-specific data collection, calibration, and model training, thereby limiting generalisability. We propose UniForce, a novel unified tactile representation learning framework that learns a shared latent force space across diverse tactile sensors. UniForce reduces cross-sensor domain shift by jointly modeling inverse dynamics (image-to-force) and forward dynamics (force-to-image), constrained by force equilibrium and image reconstruction losses to produce force-grounded representations. To avoid reliance on expensive external force/torque (F/T) sensors, we exploit static equilibrium and collect force-paired data via direct sensor--object--sensor interactions, enabling cross-sensor alignment with contact force. The resulting universal tactile encoder can be plugged into downstream force-aware robot manipulation tasks with zero-shot transfer, without retraining or finetuning. Extensive experiments on heterogeneous tactile sensors including GelSight, TacTip, and uSkin, demonstrate consistent improvements in force estimation over prior methods, and enable effective cross-sensor coordination in Vision-Tactile-Language-Action (VTLA) models for a robotic wiping task. Code and datasets will be released.
NeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot Control
Oct 23, 2025Grasping accuracy is a critical prerequisite for precise object manipulation, often requiring careful alignment between the robot hand and object. Neural Descriptor Fields (NDF) offer a promising vision-based method to generate grasping poses that generalize across object categories. However, NDF alone can produce inaccurate poses due to imperfect camera calibration, incomplete point clouds, and object variability. Meanwhile, tactile sensing enables more precise contact, but existing approaches typically learn policies limited to simple, predefined contact geometries. In this work, we introduce NeuralTouch, a multimodal framework that integrates NDF and tactile sensing to enable accurate, generalizable grasping through gentle physical interaction. Our approach leverages NDF to implicitly represent the target contact geometry, from which a deep reinforcement learning (RL) policy is trained to refine the grasp using tactile feedback. This policy is conditioned on the neural descriptors and does not require explicit specification of contact types. We validate NeuralTouch through ablation studies in simulation and zero-shot transfer to real-world manipulation tasks--such as peg-out-in-hole and bottle lid opening--without additional fine-tuning. Results show that NeuralTouch significantly improves grasping accuracy and robustness over baseline methods, offering a general framework for precise, contact-rich robotic manipulation.
Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions
Sep 09, 2025Large language models (LLMs) are beginning to automate reward design for dexterous manipulation. However, no prior work has considered tactile sensing, which is known to be critical for human-like dexterity. We present Text2Touch, bringing LLM-crafted rewards to the challenging task of multi-axis in-hand object rotation with real-world vision based tactile sensing in palm-up and palm-down configurations. Our prompt engineering strategy scales to over 70 environment variables, and sim-to-real distillation enables successful policy transfer to a tactile-enabled fully actuated four-fingered dexterous robot hand. Text2Touch significantly outperforms a carefully tuned human-engineered baseline, demonstrating superior rotation speed and stability while relying on reward functions that are an order of magnitude shorter and simpler. These results illustrate how LLM-designed rewards can significantly reduce the time from concept to deployable dexterous tactile skills, supporting more rapid and scalable multimodal robot learning. Project website: https://hpfield.github.io/text2touch-website
Design and Benchmarking of A Multi-Modality Sensor for Robotic Manipulation with GAN-Based Cross-Modality Interpretation
Jan 04, 2025



In this paper, we present the design and benchmark of an innovative sensor, ViTacTip, which fulfills the demand for advanced multi-modal sensing in a compact design. A notable feature of ViTacTip is its transparent skin, which incorporates a `see-through-skin' mechanism. This mechanism aims at capturing detailed object features upon contact, significantly improving both vision-based and proximity perception capabilities. In parallel, the biomimetic tips embedded in the sensor's skin are designed to amplify contact details, thus substantially augmenting tactile and derived force perception abilities. To demonstrate the multi-modal capabilities of ViTacTip, we developed a multi-task learning model that enables simultaneous recognition of hardness, material, and textures. To assess the functionality and validate the versatility of ViTacTip, we conducted extensive benchmarking experiments, including object recognition, contact point detection, pose regression, and grating identification. To facilitate seamless switching between various sensing modalities, we employed a Generative Adversarial Network (GAN)-based approach. This method enhances the applicability of the ViTacTip sensor across diverse environments by enabling cross-modality interpretation.
Tactile SoftHand-A: 3D-Printed, Tactile, Highly-underactuated, Anthropomorphic Robot Hand with an Antagonistic Tendon Mechanism
Jun 18, 2024



For tendon-driven multi-fingered robotic hands, ensuring grasp adaptability while minimizing the number of actuators needed to provide human-like functionality is a challenging problem. Inspired by the Pisa/IIT SoftHand, this paper introduces a 3D-printed, highly-underactuated, five-finger robotic hand named the Tactile SoftHand-A, which features only two actuators. The dual-tendon design allows for the active control of specific (distal or proximal interphalangeal) joints to adjust the hand's grasp gesture. We have also developed a new design of fully 3D-printed tactile sensor that requires no hand assembly and is printed directly as part of the robotic finger. This sensor is integrated into the fingertips and combined with the antagonistic tendon mechanism to develop a human-hand-guided tactile feedback grasping system. The system can actively mirror human hand gestures, adaptively stabilize grasp gestures upon contact, and adjust grasp gestures to prevent object movement after detecting slippage. Finally, we designed four different experiments to evaluate the novel fingers coupled with the antagonistic mechanism for controlling the robotic hand's gestures, adaptive grasping ability, and human-hand-guided tactile feedback grasping capability. The experimental results demonstrate that the Tactile SoftHand-A can adaptively grasp objects of a wide range of shapes and automatically adjust its gripping gestures upon detecting contact and slippage. Overall, this study points the way towards a class of low-cost, accessible, 3D-printable, underactuated human-like robotic hands, and we openly release the designs to facilitate others to build upon this work. This work is Open-sourced at github.com/SoutheastWind/Tactile_SoftHand_A
AnyRotate: Gravity-Invariant In-Hand Object Rotation with Sim-to-Real Touch
May 12, 2024



In-hand manipulation is an integral component of human dexterity. Our hands rely on tactile feedback for stable and reactive motions to ensure objects do not slip away unintentionally during manipulation. For a robot hand, this level of dexterity requires extracting and utilizing rich contact information for precise motor control. In this paper, we present AnyRotate, a system for gravity-invariant multi-axis in-hand object rotation using dense featured sim-to-real touch. We construct a continuous contact feature representation to provide tactile feedback for training a policy in simulation and introduce an approach to perform zero-shot policy transfer by training an observation model to bridge the sim-to-real gap. Our experiments highlight the benefit of detailed contact information when handling objects with varying properties. In the real world, we demonstrate successful sim-to-real transfer of the dense tactile policy, generalizing to a diverse range of objects for various rotation axes and hand directions and outperforming other forms of low-dimensional touch. Interestingly, despite not having explicit slip detection, rich multi-fingered tactile sensing can implicitly detect object movement within grasp and provide a reactive behavior that improves the robustness of the policy, highlighting the importance of information-rich tactile sensing for in-hand manipulation.
DexiTac: Soft Dexterous Tactile Gripping
May 05, 2024



Grasping object,whether they are flat, round, or narrow and whether they have regular or irregular shapes,introduces difficulties in determining the ideal grasping posture, even for the most state-of-the-art grippers. In this article, we presented a reconfigurable pneumatic gripper with fingers that could be set in various configurations, such as hooking, supporting, closuring, and pinching. Each finger incorporates a dexterous joint, a rotating joint, and a customized plug-and-play visuotactile sensor, the DigiTac-v1.5, to control manipulation in real time. We propose a tactile kernel density manipulation strategy for simple and versatile control, including detecting grasp stability, responding to disturbances and guiding dexterous manipulations. We develop a double closed-loop control system that separately focuses on secure grasping and task management, demonstrated with tasks that highlight the capabilities above. The gripper is relatively easy to fabricate and customize, offering a promising and extensible way to combine soft dexterity and tactile sensing for diverse applications in robotic manipulation.
Snap-it, Tap-it, Splat-it: Tactile-Informed 3D Gaussian Splatting for Reconstructing Challenging Surfaces
Mar 29, 2024



Touch and vision go hand in hand, mutually enhancing our ability to understand the world. From a research perspective, the problem of mixing touch and vision is underexplored and presents interesting challenges. To this end, we propose Tactile-Informed 3DGS, a novel approach that incorporates touch data (local depth maps) with multi-view vision data to achieve surface reconstruction and novel view synthesis. Our method optimises 3D Gaussian primitives to accurately model the object's geometry at points of contact. By creating a framework that decreases the transmittance at touch locations, we achieve a refined surface reconstruction, ensuring a uniformly smooth depth map. Touch is particularly useful when considering non-Lambertian objects (e.g. shiny or reflective surfaces) since contemporary methods tend to fail to reconstruct with fidelity specular highlights. By combining vision and tactile sensing, we achieve more accurate geometry reconstructions with fewer images than prior methods. We conduct evaluation on objects with glossy and reflective surfaces and demonstrate the effectiveness of our approach, offering significant improvements in reconstruction quality.
Pose and shear-based tactile servoing
Dec 13, 2023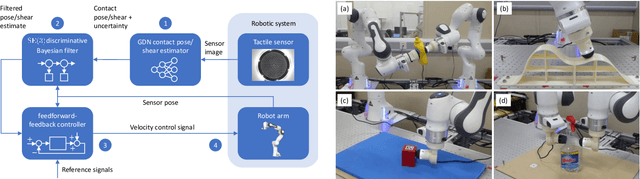
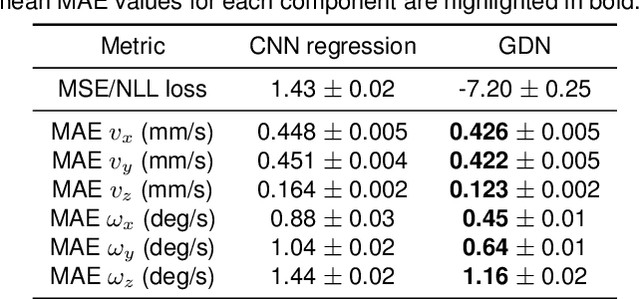
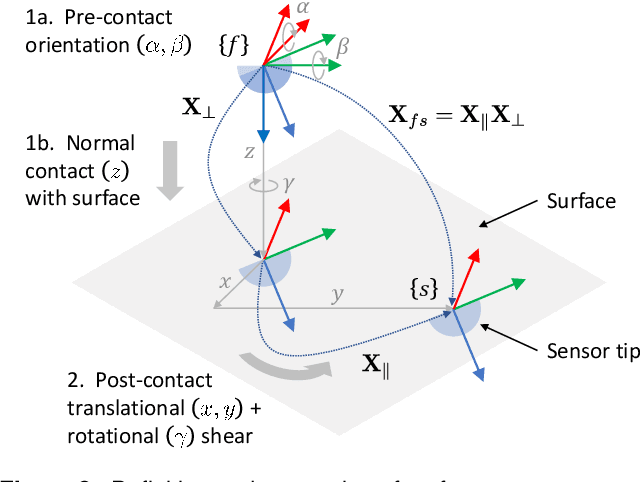
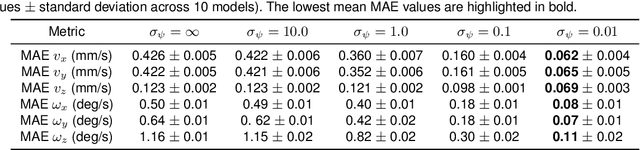
Tactile servoing is an important technique because it enables robots to manipulate objects with precision and accuracy while adapting to changes in their environments in real-time. One approach for tactile servo control with high-resolution soft tactile sensors is to estimate the contact pose relative to an object surface using a convolutional neural network (CNN) for use as a feedback signal. In this paper, we investigate how the surface pose estimation model can be extended to include shear, and utilize these combined pose-and-shear models to develop a tactile robotic system that can be programmed for diverse non-prehensile manipulation tasks, such as object tracking, surface following, single-arm object pushing and dual-arm object pushing. In doing this, two technical challenges had to be overcome. Firstly, the use of tactile data that includes shear-induced slippage can lead to error-prone estimates unsuitable for accurate control, and so we modified the CNN into a Gaussian-density neural network and used a discriminative Bayesian filter to improve the predictions with a state dynamics model that utilizes the robot kinematics. Secondly, to achieve smooth robot motion in 3D space while interacting with objects, we used SE(3) velocity-based servo control, which required re-deriving the Bayesian filter update equations using Lie group theory, as many standard assumptions do not hold for state variables defined on non-Euclidean manifolds. In future, we believe that pose and shear-based tactile servoing will enable many object manipulation tasks and the fully-dexterous utilization of multi-fingered tactile robot hands. Video: https://www.youtube.com/watch?v=xVs4hd34ek0
TouchSDF: A DeepSDF Approach for 3D Shape Reconstruction using Vision-Based Tactile Sensing
Nov 21, 2023



Humans rely on their visual and tactile senses to develop a comprehensive 3D understanding of their physical environment. Recently, there has been a growing interest in exploring and manipulating objects using data-driven approaches that utilise high-resolution vision-based tactile sensors. However, 3D shape reconstruction using tactile sensing has lagged behind visual shape reconstruction because of limitations in existing techniques, including the inability to generalise over unseen shapes, the absence of real-world testing, and limited expressive capacity imposed by discrete representations. To address these challenges, we propose TouchSDF, a Deep Learning approach for tactile 3D shape reconstruction that leverages the rich information provided by a vision-based tactile sensor and the expressivity of the implicit neural representation DeepSDF. Our technique consists of two components: (1) a Convolutional Neural Network that maps tactile images into local meshes representing the surface at the touch location, and (2) an implicit neural function that predicts a signed distance function to extract the desired 3D shape. This combination allows TouchSDF to reconstruct smooth and continuous 3D shapes from tactile inputs in simulation and real-world settings, opening up research avenues for robust 3D-aware representations and improved multimodal perception in robotics. Code and supplementary material are available at: https://touchsdf.github.io/