 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnyRotate: Gravity-Invariant In-Hand Object Rotation with Sim-to-Real Touch
May 12, 2024



In-hand manipulation is an integral component of human dexterity. Our hands rely on tactile feedback for stable and reactive motions to ensure objects do not slip away unintentionally during manipulation. For a robot hand, this level of dexterity requires extracting and utilizing rich contact information for precise motor control. In this paper, we present AnyRotate, a system for gravity-invariant multi-axis in-hand object rotation using dense featured sim-to-real touch. We construct a continuous contact feature representation to provide tactile feedback for training a policy in simulation and introduce an approach to perform zero-shot policy transfer by training an observation model to bridge the sim-to-real gap. Our experiments highlight the benefit of detailed contact information when handling objects with varying properties. In the real world, we demonstrate successful sim-to-real transfer of the dense tactile policy, generalizing to a diverse range of objects for various rotation axes and hand directions and outperforming other forms of low-dimensional touch. Interestingly, despite not having explicit slip detection, rich multi-fingered tactile sensing can implicitly detect object movement within grasp and provide a reactive behavior that improves the robustness of the policy, highlighting the importance of information-rich tactile sensing for in-hand manipulation.
TouchSDF: A DeepSDF Approach for 3D Shape Reconstruction using Vision-Based Tactile Sensing
Nov 21, 2023



Humans rely on their visual and tactile senses to develop a comprehensive 3D understanding of their physical environment. Recently, there has been a growing interest in exploring and manipulating objects using data-driven approaches that utilise high-resolution vision-based tactile sensors. However, 3D shape reconstruction using tactile sensing has lagged behind visual shape reconstruction because of limitations in existing techniques, including the inability to generalise over unseen shapes, the absence of real-world testing, and limited expressive capacity imposed by discrete representations. To address these challenges, we propose TouchSDF, a Deep Learning approach for tactile 3D shape reconstruction that leverages the rich information provided by a vision-based tactile sensor and the expressivity of the implicit neural representation DeepSDF. Our technique consists of two components: (1) a Convolutional Neural Network that maps tactile images into local meshes representing the surface at the touch location, and (2) an implicit neural function that predicts a signed distance function to extract the desired 3D shape. This combination allows TouchSDF to reconstruct smooth and continuous 3D shapes from tactile inputs in simulation and real-world settings, opening up research avenues for robust 3D-aware representations and improved multimodal perception in robotics. Code and supplementary material are available at: https://touchsdf.github.io/
Attention for Robot Touch: Tactile Saliency Prediction for Robust Sim-to-Real Tactile Control
Aug 02, 2023High-resolution tactile sensing can provide accurate information about local contact in contact-rich robotic tasks. However, the deployment of such tasks in unstructured environments remains under-investigated. To improve the robustness of tactile robot control in unstructured environments, we propose and study a new concept: \textit{tactile saliency} for robot touch, inspired by the human touch attention mechanism from neuroscience and the visual saliency prediction problem from computer vision. In analogy to visual saliency, this concept involves identifying key information in tactile images captured by a tactile sensor. While visual saliency datasets are commonly annotated by humans, manually labelling tactile images is challenging due to their counterintuitive patterns. To address this challenge, we propose a novel approach comprised of three interrelated networks: 1) a Contact Depth Network (ConDepNet), which generates a contact depth map to localize deformation in a real tactile image that contains target and noise features; 2) a Tactile Saliency Network (TacSalNet), which predicts a tactile saliency map to describe the target areas for an input contact depth map; 3) and a Tactile Noise Generator (TacNGen), which generates noise features to train the TacSalNet. Experimental results in contact pose estimation and edge-following in the presence of distractors showcase the accurate prediction of target features from real tactile images. Overall, our tactile saliency prediction approach gives robust sim-to-real tactile control in environments with unknown distractors. Project page: https://sites.google.com/view/tactile-saliency/.
Sim-to-Real Model-Based and Model-Free Deep Reinforcement Learning for Tactile Pushing
Jul 26, 2023



Object pushing presents a key non-prehensile manipulation problem that is illustrative of more complex robotic manipulation tasks. While deep reinforcement learning (RL) methods have demonstrated impressive learning capabilities using visual input, a lack of tactile sensing limits their capability for fine and reliable control during manipulation. Here we propose a deep RL approach to object pushing using tactile sensing without visual input, namely tactile pushing. We present a goal-conditioned formulation that allows both model-free and model-based RL to obtain accurate policies for pushing an object to a goal. To achieve real-world performance, we adopt a sim-to-real approach. Our results demonstrate that it is possible to train on a single object and a limited sample of goals to produce precise and reliable policies that can generalize to a variety of unseen objects and pushing scenarios without domain randomization. We experiment with the trained agents in harsh pushing conditions, and show that with significantly more training samples, a model-free policy can outperform a model-based planner, generating shorter and more reliable pushing trajectories despite large disturbances. The simplicity of our training environment and effective real-world performance highlights the value of rich tactile information for fine manipulation. Code and videos are available at https://sites.google.com/view/tactile-rl-pushing/.
Bi-Touch: Bimanual Tactile Manipulation with Sim-to-Real Deep Reinforcement Learning
Jul 12, 2023Bimanual manipulation with tactile feedback will be key to human-level robot dexterity. However, this topic is less explored than single-arm settings, partly due to the availability of suitable hardware along with the complexity of designing effective controllers for tasks with relatively large state-action spaces. Here we introduce a dual-arm tactile robotic system (Bi-Touch) based on the Tactile Gym 2.0 setup that integrates two affordable industrial-level robot arms with low-cost high-resolution tactile sensors (TacTips). We present a suite of bimanual manipulation tasks tailored towards tactile feedback: bi-pushing, bi-reorienting and bi-gathering. To learn effective policies, we introduce appropriate reward functions for these tasks and propose a novel goal-update mechanism with deep reinforcement learning. We also apply these policies to real-world settings with a tactile sim-to-real approach. Our analysis highlights and addresses some challenges met during the sim-to-real application, e.g. the learned policy tended to squeeze an object in the bi-reorienting task due to the sim-to-real gap. Finally, we demonstrate the generalizability and robustness of this system by experimenting with different unseen objects with applied perturbations in the real world. Code and videos are available at https://sites.google.com/view/bi-touch/.
Semi-Supervised Disentanglement of Tactile Contact~Geometry from Sliding-Induced Shear
Aug 26, 2022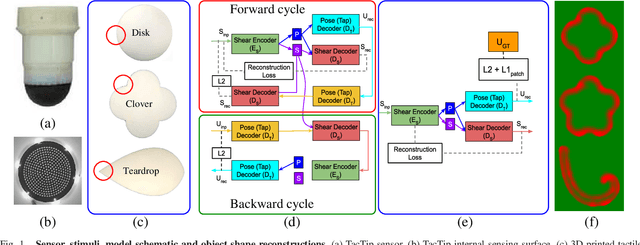
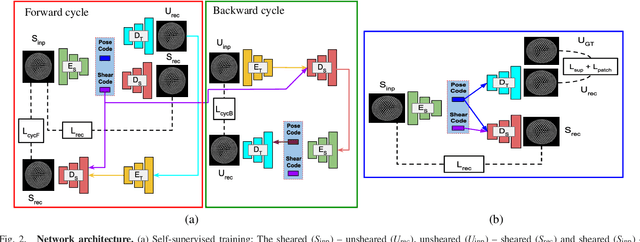
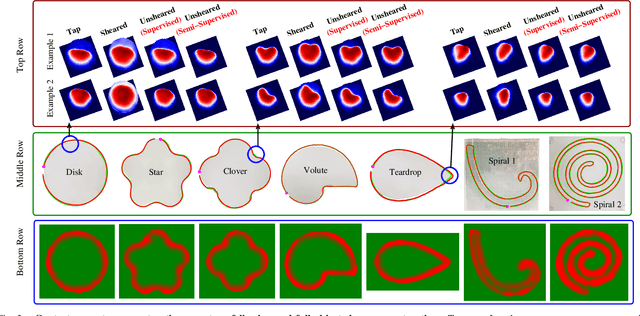

The sense of touch is fundamental to human dexterity. When mimicked in robotic touch, particularly by use of soft optical tactile sensors, it suffers from distortion due to motion-dependent shear. This complicates tactile tasks like shape reconstruction and exploration that require information about contact geometry. In this work, we pursue a semi-supervised approach to remove shear while preserving contact-only information. We validate our approach by showing a match between the model-generated unsheared images with their counterparts from vertically tapping onto the object. The model-generated unsheared images give faithful reconstruction of contact-geometry otherwise masked by shear, along with robust estimation of object pose then used for sliding exploration and full reconstruction of several planar shapes. We show that our semi-supervised approach achieves comparable performance to its fully supervised counterpart across all validation tasks with an order of magnitude less supervision. The semi-supervised method is thus more computational and labeled sample-efficient. We expect it will have broad applicability to wide range of complex tactile exploration and manipulation tasks performed via a shear-sensitive sense of touch.
Tactile Gym 2.0: Sim-to-real Deep Reinforcement Learning for Comparing Low-cost High-Resolution Robot Touch
Jul 27, 2022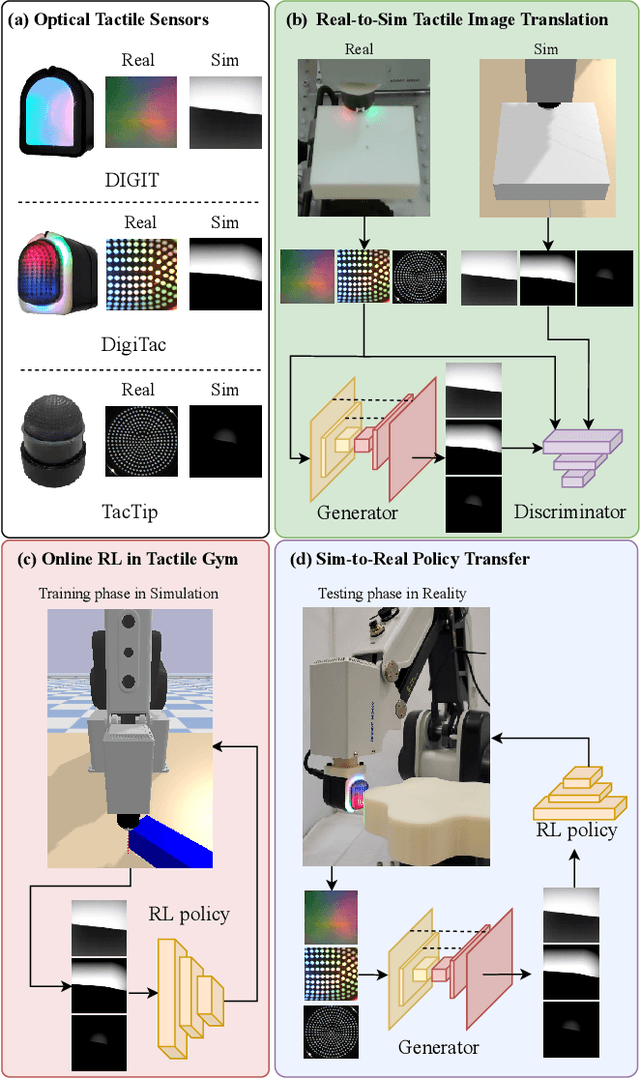
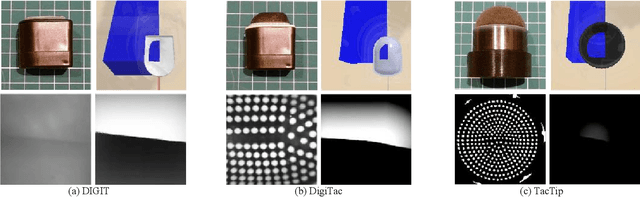


High-resolution optical tactile sensors are increasingly used in robotic learning environments due to their ability to capture large amounts of data directly relating to agent-environment interaction. However, there is a high barrier of entry to research in this area due to the high cost of tactile robot platforms, specialised simulation software, and sim-to-real methods that lack generality across different sensors. In this letter we extend the Tactile Gym simulator to include three new optical tactile sensors (TacTip, DIGIT and DigiTac) of the two most popular types, Gelsight-style (image-shading based) and TacTip-style (marker based). We demonstrate that a single sim-to-real approach can be used with these three different sensors to achieve strong real-world performance despite the significant differences between real tactile images. Additionally, we lower the barrier of entry to the proposed tasks by adapting them to an inexpensive 4-DoF robot arm, further enabling the dissemination of this benchmark. We validate the extended environment on three physically-interactive tasks requiring a sense of touch: object pushing, edge following and surface following. The results of our experimental validation highlight some differences between these sensors, which may help future researchers select and customize the physical characteristics of tactile sensors for different manipulations scenarios.
Optical Tactile Sim-to-Real Policy Transfer via Real-to-Sim Tactile Image Translation
Jun 16, 2021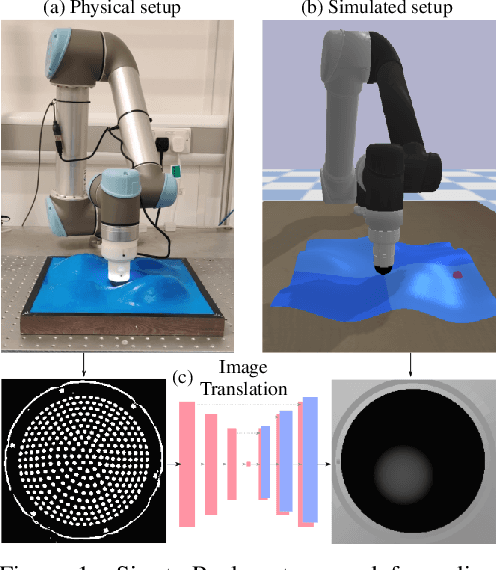
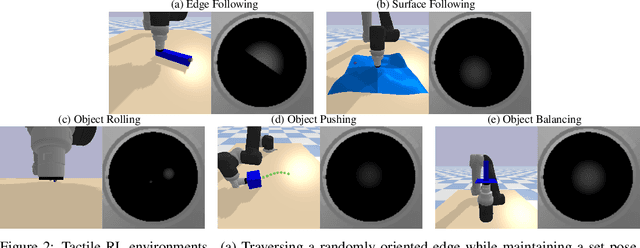
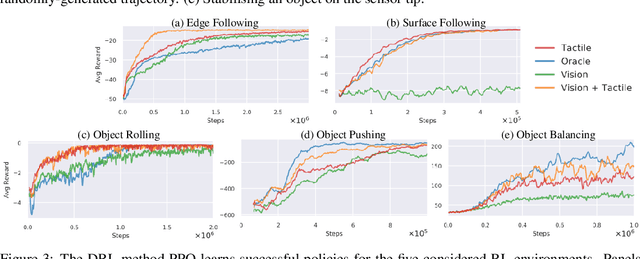
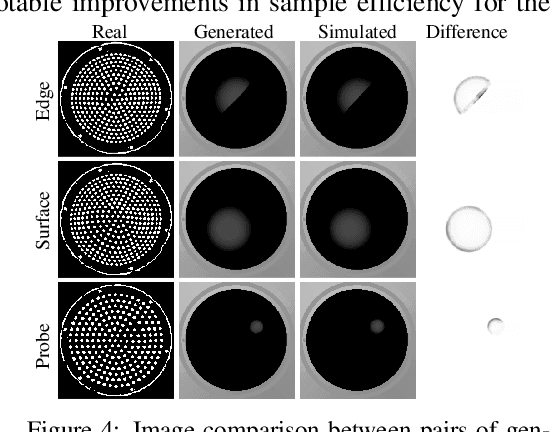
Simulation has recently become key for deep reinforcement learning to safely and efficiently acquire general and complex control policies from visual and proprioceptive inputs. Tactile information is not usually considered despite its direct relation to environment interaction. In this work, we present a suite of simulated environments tailored towards tactile robotics and reinforcement learning. A simple and fast method of simulating optical tactile sensors is provided, where high-resolution contact geometry is represented as depth images. Proximal Policy Optimisation (PPO) is used to learn successful policies across all considered tasks. A data-driven approach enables translation of the current state of a real tactile sensor to corresponding simulated depth images. This policy is implemented within a real-time control loop on a physical robot to demonstrate zero-shot sim-to-real policy transfer on several physically-interactive tasks requiring a sense of touch.
Deep Reinforcement Learning for Tactile Robotics: Learning to Type on a Braille Keyboard
Aug 06, 2020

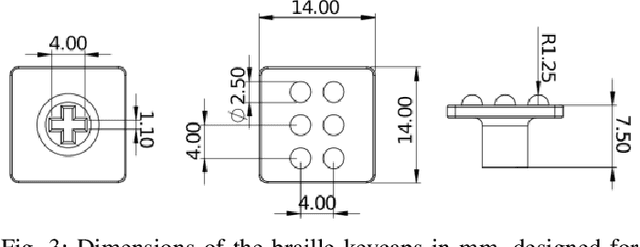

Artificial touch would seem well-suited for Reinforcement Learning (RL), since both paradigms rely on interaction with an environment. Here we propose a new environment and set of tasks to encourage development of tactile reinforcement learning: learning to type on a braille keyboard. Four tasks are proposed, progressing in difficulty from arrow to alphabet keys and from discrete to continuous actions. A simulated counterpart is also constructed by sampling tactile data from the physical environment. Using state-of-the-art deep RL algorithms, we show that all of these tasks can be successfully learnt in simulation, and 3 out of 4 tasks can be learned on the real robot. A lack of sample efficiency currently makes the continuous alphabet task impractical on the robot. To the best of our knowledge, this work presents the first demonstration of successfully training deep RL agents in the real world using observations that exclusively consist of tactile images. To aid future research utilising this environment, the code for this project has been released along with designs of the braille keycaps for 3D printing and a guide for recreating the experiments. A brief video summary is also available at https://youtu.be/eNylCA2uE_E.
Tactile Model O: Fabrication and testing of a 3d-printed, three-fingered tactile robot hand
Jul 17, 2019



Bringing tactile sensation to robotic hands will allow for more effective grasping, along with the wide range of benefits of human-like touch. Here we present a 3d-printed, three-fingered tactile robot hand comprising an OpenHand Model~O customized to house a TacTip optical biomimetic tactile sensor in the distal phalanx of each finger. We expect that the grasping capabilities of the Model O combined with the benefits of sophisticated tactile sensing will result in an effective platform -- the tactile Model O (T-MO). Our current T-MO design uses three JeVois machine vision systems, each comprising a miniature camera in the tactile fingertip with a vision processing module in the base of the hand. To evaluate the capabilities of the T-MO, we benchmark its grasping performance using the Gripper Assessment Benchmark on the YCB object set. We then tested its tactile sensing capabilities with two experiments: firstly, tactile object classification on a subset of objects that can be reliably grasped, and secondly, predicting whether a grasp will successfully lift one of these objects under randomly perturbed grasps that sometimes fail. In all cases, the results are consistent with the state-of-the-art, taking advantage of advances in deep learning and convolutional neural networks from computer vision that apply to the tactile image outputs. Overall, this work demonstrates that the T-MO is an effective platform for robot hand research and we expect it to open-up a range of applications in autonomous object handling. Video: https://youtu.be/oZ41U5pyK6Y