 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuralTouch: Neural Descriptors for Precise Sim-to-Real Tactile Robot Control
Oct 23, 2025Grasping accuracy is a critical prerequisite for precise object manipulation, often requiring careful alignment between the robot hand and object. Neural Descriptor Fields (NDF) offer a promising vision-based method to generate grasping poses that generalize across object categories. However, NDF alone can produce inaccurate poses due to imperfect camera calibration, incomplete point clouds, and object variability. Meanwhile, tactile sensing enables more precise contact, but existing approaches typically learn policies limited to simple, predefined contact geometries. In this work, we introduce NeuralTouch, a multimodal framework that integrates NDF and tactile sensing to enable accurate, generalizable grasping through gentle physical interaction. Our approach leverages NDF to implicitly represent the target contact geometry, from which a deep reinforcement learning (RL) policy is trained to refine the grasp using tactile feedback. This policy is conditioned on the neural descriptors and does not require explicit specification of contact types. We validate NeuralTouch through ablation studies in simulation and zero-shot transfer to real-world manipulation tasks--such as peg-out-in-hole and bottle lid opening--without additional fine-tuning. Results show that NeuralTouch significantly improves grasping accuracy and robustness over baseline methods, offering a general framework for precise, contact-rich robotic manipulation.
Tactile SoftHand-A: 3D-Printed, Tactile, Highly-underactuated, Anthropomorphic Robot Hand with an Antagonistic Tendon Mechanism
Jun 18, 2024



For tendon-driven multi-fingered robotic hands, ensuring grasp adaptability while minimizing the number of actuators needed to provide human-like functionality is a challenging problem. Inspired by the Pisa/IIT SoftHand, this paper introduces a 3D-printed, highly-underactuated, five-finger robotic hand named the Tactile SoftHand-A, which features only two actuators. The dual-tendon design allows for the active control of specific (distal or proximal interphalangeal) joints to adjust the hand's grasp gesture. We have also developed a new design of fully 3D-printed tactile sensor that requires no hand assembly and is printed directly as part of the robotic finger. This sensor is integrated into the fingertips and combined with the antagonistic tendon mechanism to develop a human-hand-guided tactile feedback grasping system. The system can actively mirror human hand gestures, adaptively stabilize grasp gestures upon contact, and adjust grasp gestures to prevent object movement after detecting slippage. Finally, we designed four different experiments to evaluate the novel fingers coupled with the antagonistic mechanism for controlling the robotic hand's gestures, adaptive grasping ability, and human-hand-guided tactile feedback grasping capability. The experimental results demonstrate that the Tactile SoftHand-A can adaptively grasp objects of a wide range of shapes and automatically adjust its gripping gestures upon detecting contact and slippage. Overall, this study points the way towards a class of low-cost, accessible, 3D-printable, underactuated human-like robotic hands, and we openly release the designs to facilitate others to build upon this work. This work is Open-sourced at github.com/SoutheastWind/Tactile_SoftHand_A
AnyRotate: Gravity-Invariant In-Hand Object Rotation with Sim-to-Real Touch
May 12, 2024



In-hand manipulation is an integral component of human dexterity. Our hands rely on tactile feedback for stable and reactive motions to ensure objects do not slip away unintentionally during manipulation. For a robot hand, this level of dexterity requires extracting and utilizing rich contact information for precise motor control. In this paper, we present AnyRotate, a system for gravity-invariant multi-axis in-hand object rotation using dense featured sim-to-real touch. We construct a continuous contact feature representation to provide tactile feedback for training a policy in simulation and introduce an approach to perform zero-shot policy transfer by training an observation model to bridge the sim-to-real gap. Our experiments highlight the benefit of detailed contact information when handling objects with varying properties. In the real world, we demonstrate successful sim-to-real transfer of the dense tactile policy, generalizing to a diverse range of objects for various rotation axes and hand directions and outperforming other forms of low-dimensional touch. Interestingly, despite not having explicit slip detection, rich multi-fingered tactile sensing can implicitly detect object movement within grasp and provide a reactive behavior that improves the robustness of the policy, highlighting the importance of information-rich tactile sensing for in-hand manipulation.
DexiTac: Soft Dexterous Tactile Gripping
May 05, 2024



Grasping object,whether they are flat, round, or narrow and whether they have regular or irregular shapes,introduces difficulties in determining the ideal grasping posture, even for the most state-of-the-art grippers. In this article, we presented a reconfigurable pneumatic gripper with fingers that could be set in various configurations, such as hooking, supporting, closuring, and pinching. Each finger incorporates a dexterous joint, a rotating joint, and a customized plug-and-play visuotactile sensor, the DigiTac-v1.5, to control manipulation in real time. We propose a tactile kernel density manipulation strategy for simple and versatile control, including detecting grasp stability, responding to disturbances and guiding dexterous manipulations. We develop a double closed-loop control system that separately focuses on secure grasping and task management, demonstrated with tasks that highlight the capabilities above. The gripper is relatively easy to fabricate and customize, offering a promising and extensible way to combine soft dexterity and tactile sensing for diverse applications in robotic manipulation.
A Soft-Rigid Hybrid Gripper with Lateral Compliance and Dexterous In-hand Manipulation
Oct 19, 2021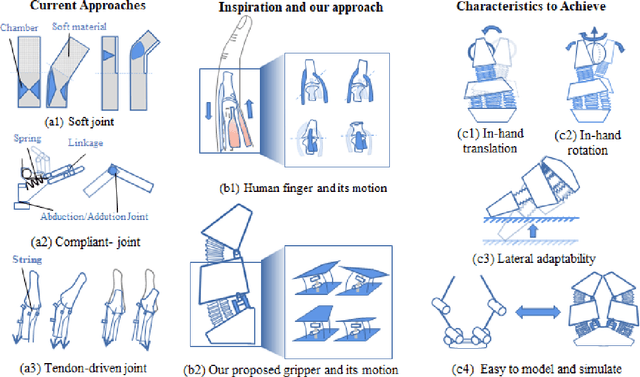
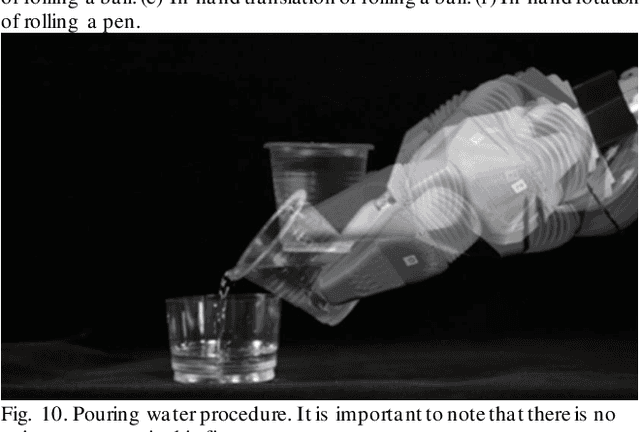

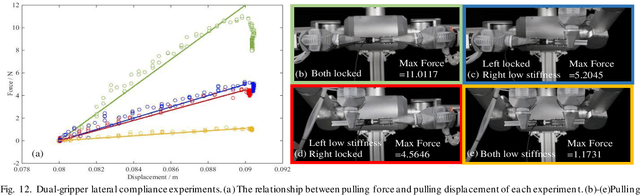
Soft grippers are receiving growing attention due to their compliance-based interactive safety and dexterity. Hybrid gripper (soft actuators enhanced by rigid constraints) is a new trend in soft gripper design. With right structural components actuated by soft actuators, they could achieve excellent grasping adaptability and payload, while also being easy to model and control with conventional kinematics. However, existing works were mostly focused on achieving superior payload and perception with simple planar workspaces, resulting in far less dexterity compared with conventional grippers. In this work, we took inspiration from the human Metacarpophalangeal (MCP) joint and proposed a new hybrid gripper design with 8 independent muscles. It was shown that adding the MCP complexity was critical in enabling a range of novel features in the hybrid gripper, including in-hand manipulation, lateral passive compliance, as well as new control modes. A prototype gripper was fabricated and tested on our proprietary dual-arm robot platform with vision guided grasping. With very lightweight pneumatic bellows soft actuators, the gripper could grasp objects over 25 times its own weight with lateral compliance. Using the dual-arm platform, highly anthropomorphic dexterous manipulations were demonstrated using two hybrid grippers, from Tug-of-war on a rigid rod, to passing a soft towel between two grippers using in-hand manipulation. Matching with the novel features and performance specifications of the proposed hybrid gripper, the underlying modeling, actuation, control, and experimental validation details were also presented, offering a promising approach to achieving enhanced dexterity, strength, and compliance in robotic grippers.