 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpress Yourself: Enabling large-scale public events involving multi-human-swarm interaction for social applications with MOSAIX
Nov 15, 2024



Robot swarms have the potential to help groups of people with social tasks, given their ability to scale to large numbers of robots and users. Developing multi-human-swarm interaction is therefore crucial to support multiple people interacting with the swarm simultaneously - which is an area that is scarcely researched, unlike single-human, single-robot or single-human, multi-robot interaction. Moreover, most robots are still confined to laboratory settings. In this paper, we present our work with MOSAIX, a swarm of robot Tiles, that facilitated ideation at a science museum. 63 robots were used as a swarm of smart sticky notes, collecting input from the public and aggregating it based on themes, providing an evolving visualization tool that engaged visitors and fostered their participation. Our contribution lies in creating a large-scale (63 robots and 294 attendees) public event, with a completely decentralized swarm system in real-life settings. We also discuss learnings we obtained that might help future researchers create multi-human-swarm interaction with the public.
Distributed Spatial Awareness for Robot Swarms
Nov 11, 2024



Building a distributed spatial awareness within a swarm of locally sensing and communicating robots enables new swarm algorithms. We use local observations by robots of each other and Gaussian Belief Propagation message passing combined with continuous swarm movement to build a global and distributed swarm-centric frame of reference. With low bandwidth and computation requirements, this shared reference frame allows new swarm algorithms. We characterise the system in simulation and demonstrate two example algorithms.
Designing robot swarms: a puzzle, a problem, and a mess
Oct 29, 2024Framing an issue as a puzzle, problem, or mess is an illustrative approach to characterizing the issue's complexity within organizational theory and systems thinking. We use this approach to characterize the issue of designing collective behaviors for robot swarms and discuss how various research goals have shaped the current state of the field. We contextualize our discussion at these three levels by highlighting relevant literature. Our aim is to emphasize key challenges that arise in the development of robot swarms for real-world applications and to motivate further work on promising research directions.
* 40th Anniversary of the IEEE Conference on Robotics and Automation (ICRA@40)
A Multi-Level Corroborative Approach for Verification and Validation of Autonomous Robotic Swarms
Jul 22, 2024Modelling and characterizing emergent behaviour within a swarm can pose significant challenges in terms of 'assurance'. Assurance tasks encompass adherence to standards, certification processes, and the execution of verification and validation (V&V) methods, such as model checking. In this study, we propose a holistic, multi-level modelling approach for formally verifying and validating autonomous robotic swarms, which are defined at the macroscopic formal modelling, low-fidelity simulation, high-fidelity simulation, and real-robot levels. Our formal macroscopic models, used for verification, are characterized by data derived from actual simulations, ensuring both accuracy and traceability across different system models. Furthermore, our work combines formal verification with experimental validation involving real robots. In this way, our corroborative approach for V&V seeks to enhance confidence in the evidence, in contrast to employing these methods separately. We explore our approach through a case study focused on a swarm of robots operating within a public cloakroom.
Awareness in robotics: An early perspective from the viewpoint of the EIC Pathfinder Challenge "Awareness Inside''
Feb 14, 2024Consciousness has been historically a heavily debated topic in engineering, science, and philosophy. On the contrary, awareness had less success in raising the interest of scholars in the past. However, things are changing as more and more researchers are getting interested in answering questions concerning what awareness is and how it can be artificially generated. The landscape is rapidly evolving, with multiple voices and interpretations of the concept being conceived and techniques being developed. The goal of this paper is to summarize and discuss the ones among these voices connected with projects funded by the EIC Pathfinder Challenge called ``Awareness Inside'', a nonrecurring call for proposals within Horizon Europe designed specifically for fostering research on natural and synthetic awareness. In this perspective, we dedicate special attention to challenges and promises of applying synthetic awareness in robotics, as the development of mature techniques in this new field is expected to have a special impact on generating more capable and trustworthy embodied systems.
Swarm Performance Indicators: Metrics for Robustness, Fault Tolerance, Scalability and Adaptability
Nov 03, 2023


Swarms have distributed control and so are assumed to inherently have superior robustness, scalability and adaptability compared to centralised multi-agent systems. However, these features have generally only been defined qualitatively and there is a lack of quantitative metrics and experimental measures for the claimed parameters. Swarm Performance Indicators are defined here as Key Performance Indicators for swarm features but can be applied to multi-agent systems with centralised control as well. These swarm features are Robustness, Fault Tolerance, Adaptability and Scalability. Swarm Performance Indicators can be used to highlight the benefits of swarms beyond solely considering task-based performance metrics (e.g. time taken)
Evolving Multi-Objective Neural Network Controllers for Robot Swarms
Jul 26, 2023



Many swarm robotics tasks consist of multiple conflicting objectives. This research proposes a multi-objective evolutionary neural network approach to developing controllers for swarms of robots. The swarm robot controllers are trained in a low-fidelity Python simulator and then tested in a high-fidelity simulated environment using Webots. Simulations are then conducted to test the scalability of the evolved multi-objective robot controllers to environments with a larger number of robots. The results presented demonstrate that the proposed approach can effectively control each of the robots. The robot swarm exhibits different behaviours as the weighting for each objective is adjusted. The results also confirm that multi-objective neural network controllers evolved in a low-fidelity simulator can be transferred to high-fidelity simulated environments and that the controllers can scale to environments with a larger number of robots without further retraining needed.
TacMMs: Tactile Mobile Manipulators for Warehouse Automation
Jun 29, 2023



Multi-robot platforms are playing an increasingly important role in warehouse automation for efficient goods transport. This paper proposes a novel customization of a multi-robot system, called Tactile Mobile Manipulators (TacMMs). Each TacMM integrates a soft optical tactile sensor and a mobile robot with a load-lifting mechanism, enabling cooperative transportation in tasks requiring coordinated physical interaction. More specifically, we mount the TacTip (biomimetic optical tactile sensor) on the Distributed Organisation and Transport System (DOTS) mobile robot. The tactile information then helps the mobile robots adjust the relative robot-object pose, thereby increasing the efficiency of load-lifting tasks. This study compares the performance of using two TacMMs with tactile perception with traditional vision-based pose adjustment for load-lifting. The results show that the average success rate of the TacMMs (66%) is improved over a purely visual-based method (34%), with a larger improvement when the mass of the load was non-uniformly distributed. Although this initial study considers two TacMMs, we expect the benefits of tactile perception to extend to multiple mobile robots. Website: https://sites.google.com/view/tacmms
AERoS: Assurance of Emergent Behaviour in Autonomous Robotic Swarms
Feb 20, 2023The behaviours of a swarm are not explicitly engineered. Instead, they are an emergent consequence of the interactions of individual agents with each other and their environment. This emergent functionality poses a challenge to safety assurance. The main contribution of this paper is a process for the safety assurance of emergent behaviour in autonomous robotic swarms called AERoS, following the guidance on the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). We explore our proposed process using a case study centred on a robot swarm operating a public cloakroom.
Understandable Controller Extraction from Video Observations of Swarms
Sep 02, 2022

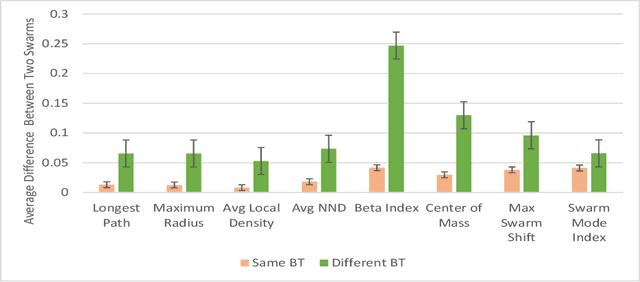
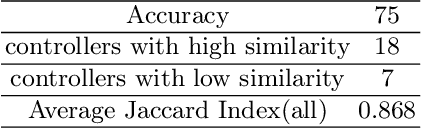
Swarm behavior emerges from the local interaction of agents and their environment often encoded as simple rules. Extracting the rules by watching a video of the overall swarm behavior could help us study and control swarm behavior in nature, or artificial swarms that have been designed by external actors. It could also serve as a new source of inspiration for swarm robotics. Yet extracting such rules is challenging as there is often no visible link between the emergent properties of the swarm and their local interactions. To this end, we develop a method to automatically extract understandable swarm controllers from video demonstrations. The method uses evolutionary algorithms driven by a fitness function that compares eight high-level swarm metrics. The method is able to extract many controllers (behavior trees) in a simple collective movement task. We then provide a qualitative analysis of behaviors that resulted in different trees, but similar behaviors. This provides the first steps toward automatic extraction of swarm controllers based on observations.