 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning robot swarms: a puzzle, a problem, and a mess
Oct 29, 2024Framing an issue as a puzzle, problem, or mess is an illustrative approach to characterizing the issue's complexity within organizational theory and systems thinking. We use this approach to characterize the issue of designing collective behaviors for robot swarms and discuss how various research goals have shaped the current state of the field. We contextualize our discussion at these three levels by highlighting relevant literature. Our aim is to emphasize key challenges that arise in the development of robot swarms for real-world applications and to motivate further work on promising research directions.
* 40th Anniversary of the IEEE Conference on Robotics and Automation (ICRA@40)
Collective perception for tracking people with a robot swarm
Oct 09, 2024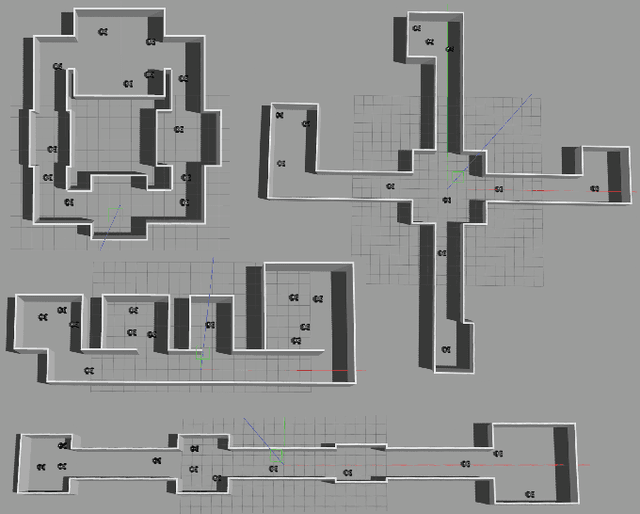
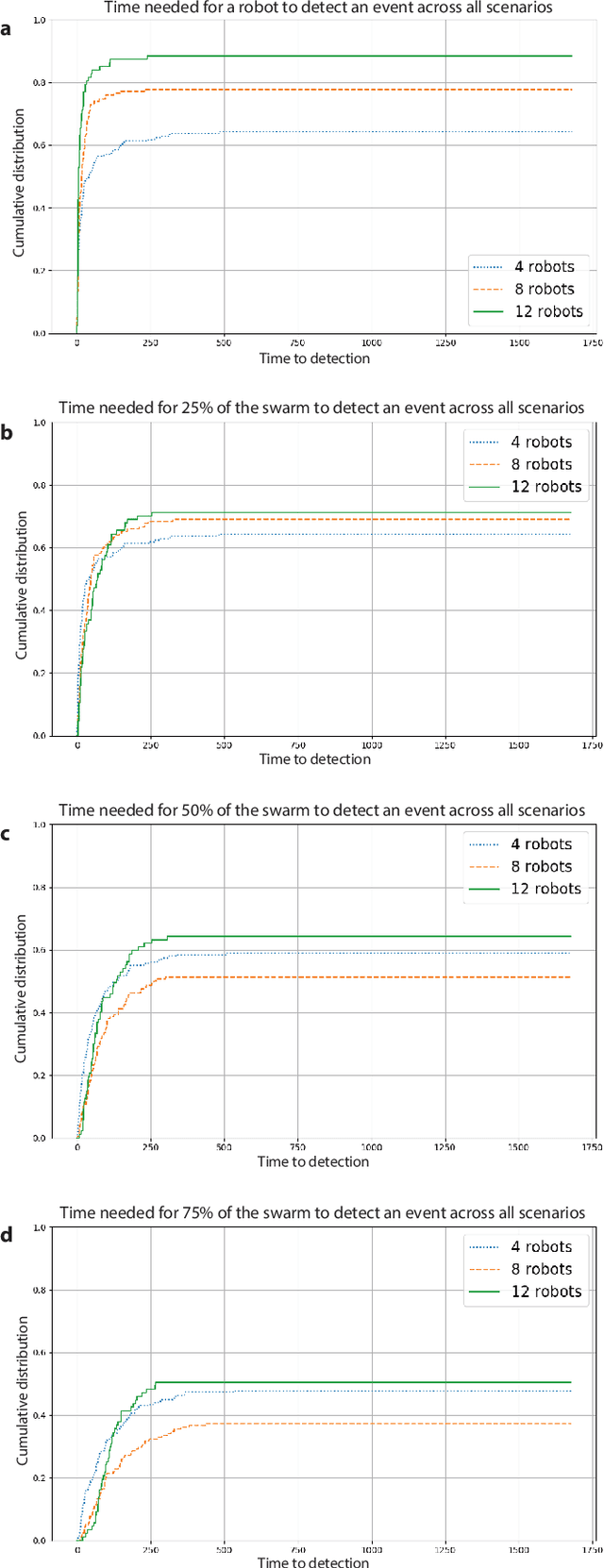
Swarm perception refers to the ability of a robot swarm to utilize the perception capabilities of each individual robot, forming a collective understanding of the environment. Their distributed nature enables robot swarms to continuously monitor dynamic environments by maintaining a constant presence throughout the space.In this study, we present a preliminary experiment on the collective tracking of people using a robot swarm. The experiment was conducted in simulation across four different office environments, with swarms of varying sizes. The robots were provided with images sampled from a dataset of real-world office environment pictures.We measured the time distribution required for a robot to detect a person changing location and to propagate this information to increasing fractions of the swarm. The results indicate that robot swarms show significant promise in monitoring dynamic environments.
Leveraging swarm capabilities to assist other systems
May 07, 2024Most studies in swarm robotics treat the swarm as an isolated system of interest. We argue that the prevailing view of swarms as self-sufficient, independent systems limits the scope of potential applications for swarm robotics. A robot swarm could act as a support in an heterogeneous system comprising other robots and/or human operators, in particular by quickly providing access to a large amount of data acquired in large unknown environments. Tasks such as target identification & tracking, scouting, or monitoring/surveillance could benefit from this approach.
Automatically designing robot swarms in environments populated by other robots: an experiment in robot shepherding
Apr 28, 2024


Automatic design is a promising approach to realizing robot swarms. Given a mission to be performed by the swarm, an automatic method produces the required control software for the individual robots. Automatic design has concentrated on missions that a swarm can execute independently, interacting only with a static environment and without the involvement of other active entities. In this paper, we investigate the design of robot swarms that perform their mission by interacting with other robots that populate their environment. We frame our research within robot shepherding: the problem of using a small group of robots, the shepherds, to coordinate a relatively larger group, the sheep. In our study, the group of shepherds is the swarm that is automatically designed, and the sheep are pre-programmed robots that populate its environment. We use automatic modular design and neuroevolution to produce the control software for the swarm of shepherds to coordinate the sheep. We show that automatic design can leverage mission-specific interaction strategies to enable an effective coordination between the two groups.
Automatic off-line design of robot swarms: exploring the transferability of control software and design methods across different platforms
May 25, 2023



Automatic off-line design is an attractive approach to implementing robot swarms. In this approach, a designer specifies a mission for the swarm, and an optimization process generates suitable control software for the individual robots through computer-based simulations. Most relevant literature has focused on effectively transferring control software from simulation to physical robots. For the first time, we investigate (i) whether control software generated via automatic design is transferable across robot platforms and (ii) whether the design methods that generate such control software are themselves transferable. We experiment with two ground mobile platforms with equivalent capabilities. Our measure of transferability is based on the performance drop observed when control software and/or design methods are ported from one platform to another. Results indicate that while the control software generated via automatic design is transferable in some cases, better performance can be achieved when a transferable method is directly applied to the new platform.
Show me what you want: Inverse reinforcement learning to automatically design robot swarms by demonstration
Jan 17, 2023



Automatic design is a promising approach to generating control software for robot swarms. So far, automatic design has relied on mission-specific objective functions to specify the desired collective behavior. In this paper, we explore the possibility to specify the desired collective behavior via demonstrations. We develop Demo-Cho, an automatic design method that combines inverse reinforcement learning with automatic modular design of control software for robot swarms. We show that, only on the basis of demonstrations and without the need to be provided with an explicit objective function, Demo-Cho successfully generated control software to perform four missions. We present results obtained in simulation and with physical robots.