 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMineInsight: A Multi-sensor Dataset for Humanitarian Demining Robotics in Off-Road Environments
Jun 05, 2025The use of robotics in humanitarian demining increasingly involves computer vision techniques to improve landmine detection capabilities. However, in the absence of diverse and realistic datasets, the reliable validation of algorithms remains a challenge for the research community. In this paper, we introduce MineInsight, a publicly available multi-sensor, multi-spectral dataset designed for off-road landmine detection. The dataset features 35 different targets (15 landmines and 20 commonly found objects) distributed along three distinct tracks, providing a diverse and realistic testing environment. MineInsight is, to the best of our knowledge, the first dataset to integrate dual-view sensor scans from both an Unmanned Ground Vehicle and its robotic arm, offering multiple viewpoints to mitigate occlusions and improve spatial awareness. It features two LiDARs, as well as images captured at diverse spectral ranges, including visible (RGB, monochrome), visible short-wave infrared (VIS-SWIR), and long-wave infrared (LWIR). Additionally, the dataset comes with an estimation of the location of the targets, offering a benchmark for evaluating detection algorithms. We recorded approximately one hour of data in both daylight and nighttime conditions, resulting in around 38,000 RGB frames, 53,000 VIS-SWIR frames, and 108,000 LWIR frames. MineInsight serves as a benchmark for developing and evaluating landmine detection algorithms. Our dataset is available at https://github.com/mariomlz99/MineInsight.
Collective perception for tracking people with a robot swarm
Oct 09, 2024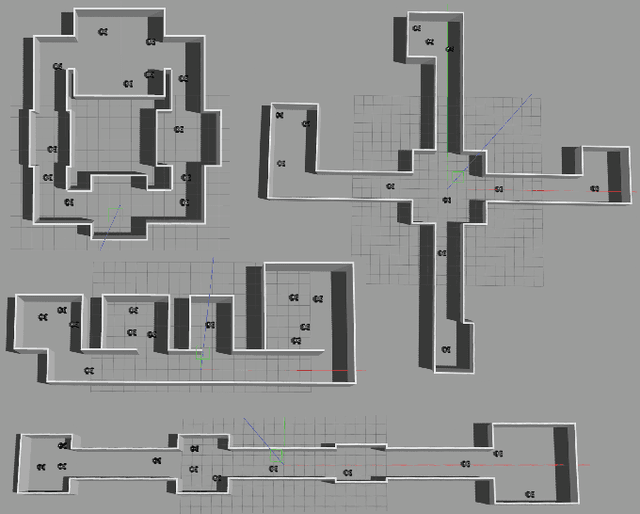
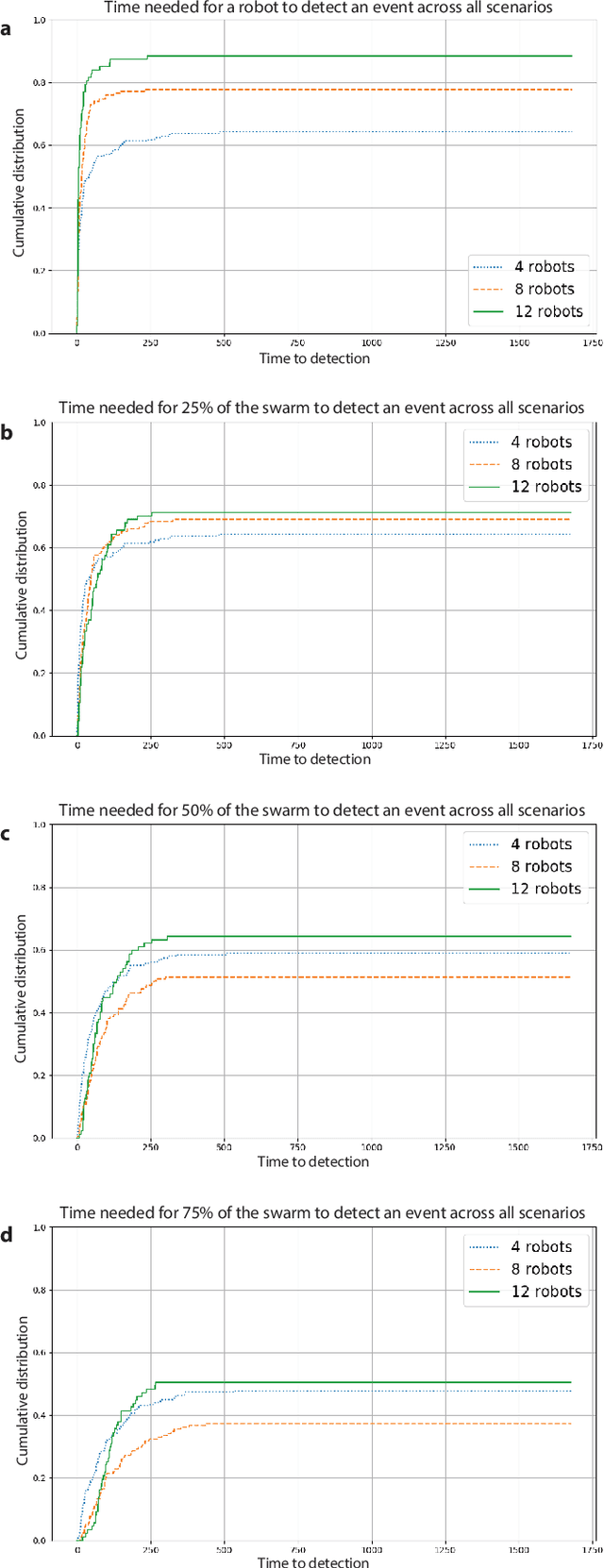
Swarm perception refers to the ability of a robot swarm to utilize the perception capabilities of each individual robot, forming a collective understanding of the environment. Their distributed nature enables robot swarms to continuously monitor dynamic environments by maintaining a constant presence throughout the space.In this study, we present a preliminary experiment on the collective tracking of people using a robot swarm. The experiment was conducted in simulation across four different office environments, with swarms of varying sizes. The robots were provided with images sampled from a dataset of real-world office environment pictures.We measured the time distribution required for a robot to detect a person changing location and to propagate this information to increasing fractions of the swarm. The results indicate that robot swarms show significant promise in monitoring dynamic environments.
HADRON: Human-friendly Control and Artificial Intelligence for Military Drone Operations
Aug 13, 2024


As drones are getting more and more entangled in our society, more untrained users require the capability to operate them. This scenario is to be achieved through the development of artificial intelligence capabilities assisting the human operator in controlling the Unmanned Aerial System (UAS) and processing the sensor data, thereby alleviating the need for extensive operator training. This paper presents the HADRON project that seeks to develop and test multiple novel technologies to enable human-friendly control of drone swarms. This project is divided into three main parts. The first part consists of the integration of different technologies for the intuitive control of drones, focusing on novice or inexperienced pilots and operators. The second part focuses on the development of a multi-drone system that will be controlled from a command and control station, in which an expert pilot can supervise the operations of the multiple drones. The third part of the project will focus on reducing the cognitive load on human operators, whether they are novice or expert pilots. For this, we will develop AI tools that will assist drone operators with semi-automated real-time data processing.
Leveraging swarm capabilities to assist other systems
May 07, 2024
Most studies in swarm robotics treat the swarm as an isolated system of interest. We argue that the prevailing view of swarms as self-sufficient, independent systems limits the scope of potential applications for swarm robotics. A robot swarm could act as a support in an heterogeneous system comprising other robots and/or human operators, in particular by quickly providing access to a large amount of data acquired in large unknown environments. Tasks such as target identification & tracking, scouting, or monitoring/surveillance could benefit from this approach.
A multi-robot system for the detection of explosive devices
Apr 22, 2024In order to clear the world of the threat posed by landmines and other explosive devices, robotic systems can play an important role. However, the development of such field robots that need to operate in hazardous conditions requires the careful consideration of multiple aspects related to the perception, mobility, and collaboration capabilities of the system. In the framework of a European challenge, the Artificial Intelligence for Detection of Explosive Devices - eXtended (AIDEDeX) project proposes to design a heterogeneous multi-robot system with advanced sensor fusion algorithms. This system is specifically designed to detect and classify improvised explosive devices, explosive ordnances, and landmines. This project integrates specialised sensors, including electromagnetic induction, ground penetrating radar, X-Ray backscatter imaging, Raman spectrometers, and multimodal cameras, to achieve comprehensive threat identification and localisation. The proposed system comprises a fleet of unmanned ground vehicles and unmanned aerial vehicles. This article details the operational phases of the AIDEDeX system, from rapid terrain exploration using unmanned aerial vehicles to specialised detection and classification by unmanned ground vehicles equipped with a robotic manipulator. Initially focusing on a centralised approach, the project will also explore the potential of a decentralised control architecture, taking inspiration from swarm robotics to provide a robust, adaptable, and scalable solution for explosive detection.
Stimulating student engagement with an AI board game tournament
Apr 22, 2023
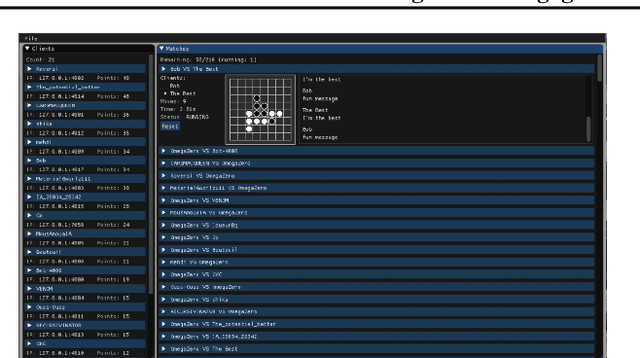
Strong foundations in basic AI techniques are key to understanding more advanced concepts. We believe that introducing AI techniques, such as search methods, early in higher education helps create a deeper understanding of the concepts seen later in more advanced AI and algorithms courses. We present a project-based and competition-based bachelor course that gives second-year students an introduction to search methods applied to board games. In groups of two, students have to use network programming and AI methods to build an AI agent to compete in a board game tournament-othello was this year's game. Students are evaluated based on the quality of their projects and on their performance during the final tournament. We believe that the introduction of gamification, in the form of competition-based learning, allows for a better learning experience for the students.