 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage-Based Swarm Perception: Decentralized Person Re-Identification via Natural Language Descriptions
Jan 18, 2026We introduce a method for decentralized person re-identification in robot swarms that leverages natural language as the primary representational modality. Unlike traditional approaches that rely on opaque visual embeddings -- high-dimensional feature vectors extracted from images -- the proposed method uses human-readable language to represent observations. Each robot locally detects and describes individuals using a vision-language model (VLM), producing textual descriptions of appearance instead of feature vectors. These descriptions are compared and clustered across the swarm without centralized coordination, allowing robots to collaboratively group observations of the same individual. Each cluster is distilled into a representative description by a language model, providing an interpretable, concise summary of the swarm's collective perception. This approach enables natural-language querying, enhances transparency, and supports explainable swarm behavior. Preliminary experiments demonstrate competitive performance in identity consistency and interpretability compared to embedding-based methods, despite current limitations in text similarity and computational load. Ongoing work explores refined similarity metrics, semantic navigation, and the extension of language-based perception to environmental elements. This work prioritizes decentralized perception and communication, while active navigation remains an open direction for future study.
Collective perception for tracking people with a robot swarm
Oct 09, 2024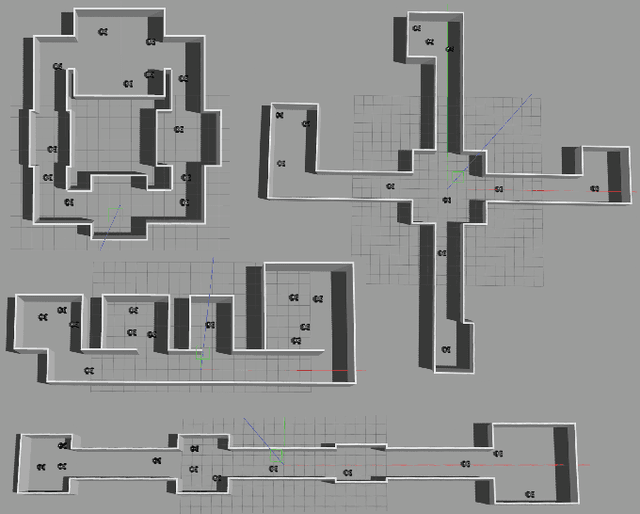
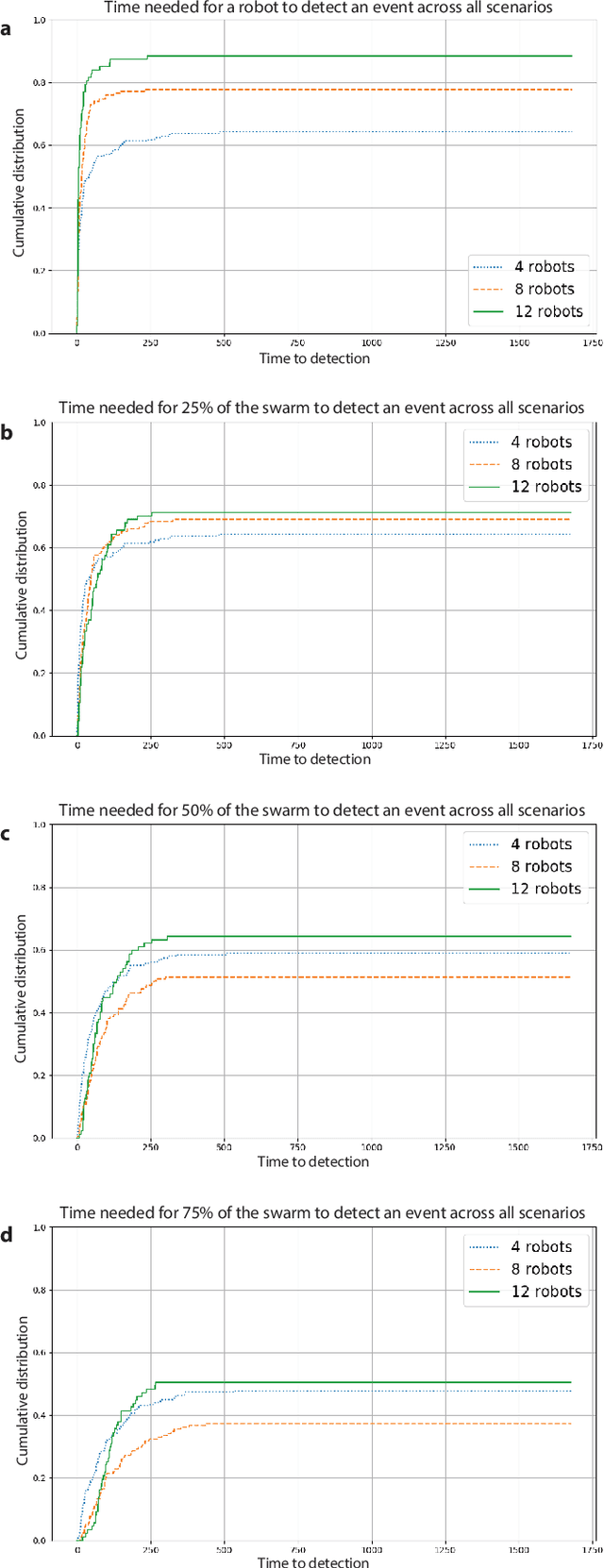
Swarm perception refers to the ability of a robot swarm to utilize the perception capabilities of each individual robot, forming a collective understanding of the environment. Their distributed nature enables robot swarms to continuously monitor dynamic environments by maintaining a constant presence throughout the space.In this study, we present a preliminary experiment on the collective tracking of people using a robot swarm. The experiment was conducted in simulation across four different office environments, with swarms of varying sizes. The robots were provided with images sampled from a dataset of real-world office environment pictures.We measured the time distribution required for a robot to detect a person changing location and to propagate this information to increasing fractions of the swarm. The results indicate that robot swarms show significant promise in monitoring dynamic environments.
Leveraging swarm capabilities to assist other systems
May 07, 2024Most studies in swarm robotics treat the swarm as an isolated system of interest. We argue that the prevailing view of swarms as self-sufficient, independent systems limits the scope of potential applications for swarm robotics. A robot swarm could act as a support in an heterogeneous system comprising other robots and/or human operators, in particular by quickly providing access to a large amount of data acquired in large unknown environments. Tasks such as target identification & tracking, scouting, or monitoring/surveillance could benefit from this approach.
Automatically designing robot swarms in environments populated by other robots: an experiment in robot shepherding
Apr 28, 2024


Automatic design is a promising approach to realizing robot swarms. Given a mission to be performed by the swarm, an automatic method produces the required control software for the individual robots. Automatic design has concentrated on missions that a swarm can execute independently, interacting only with a static environment and without the involvement of other active entities. In this paper, we investigate the design of robot swarms that perform their mission by interacting with other robots that populate their environment. We frame our research within robot shepherding: the problem of using a small group of robots, the shepherds, to coordinate a relatively larger group, the sheep. In our study, the group of shepherds is the swarm that is automatically designed, and the sheep are pre-programmed robots that populate its environment. We use automatic modular design and neuroevolution to produce the control software for the swarm of shepherds to coordinate the sheep. We show that automatic design can leverage mission-specific interaction strategies to enable an effective coordination between the two groups.
Automatic off-line design of robot swarms: exploring the transferability of control software and design methods across different platforms
May 25, 2023



Automatic off-line design is an attractive approach to implementing robot swarms. In this approach, a designer specifies a mission for the swarm, and an optimization process generates suitable control software for the individual robots through computer-based simulations. Most relevant literature has focused on effectively transferring control software from simulation to physical robots. For the first time, we investigate (i) whether control software generated via automatic design is transferable across robot platforms and (ii) whether the design methods that generate such control software are themselves transferable. We experiment with two ground mobile platforms with equivalent capabilities. Our measure of transferability is based on the performance drop observed when control software and/or design methods are ported from one platform to another. Results indicate that while the control software generated via automatic design is transferable in some cases, better performance can be achieved when a transferable method is directly applied to the new platform.
Show me what you want: Inverse reinforcement learning to automatically design robot swarms by demonstration
Jan 17, 2023



Automatic design is a promising approach to generating control software for robot swarms. So far, automatic design has relied on mission-specific objective functions to specify the desired collective behavior. In this paper, we explore the possibility to specify the desired collective behavior via demonstrations. We develop Demo-Cho, an automatic design method that combines inverse reinforcement learning with automatic modular design of control software for robot swarms. We show that, only on the basis of demonstrations and without the need to be provided with an explicit objective function, Demo-Cho successfully generated control software to perform four missions. We present results obtained in simulation and with physical robots.
Controlling Robot Swarm Aggregation through a Minority of Informed Robots
May 06, 2022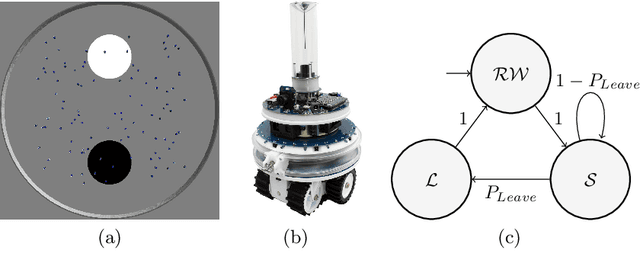
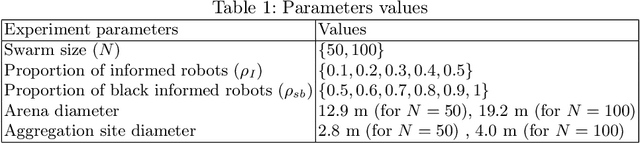
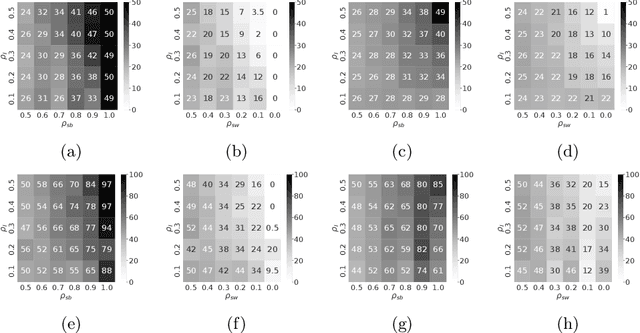
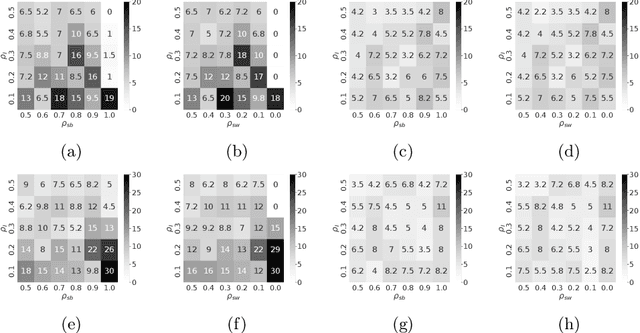
Self-organised aggregation is a well studied behaviour in swarm robotics as it is the pre-condition for the development of more advanced group-level responses. In this paper, we investigate the design of decentralised algorithms for a swarm of heterogeneous robots that self-aggregate over distinct target sites. A previous study has shown that including as part of the swarm a number of informed robots can steer the dynamic of the aggregation process to a desirable distribution of the swarm between the available aggregation sites. We have replicated the results of the previous study using a simplified approach, we removed constraints related to the communication protocol of the robots and simplified the control mechanisms regulating the transitions between states of the probabilistic controller. The results show that the performances obtained with the previous, more complex, controller can be replicated with our simplified approach which offers clear advantages in terms of portability to the physical robots and in terms of flexibility. That is, our simplified approach can generate self-organised aggregation responses in a larger set of operating conditions than what can be achieved with the complex controller.
Boolean network robotics: a proof of concept
Jan 31, 2011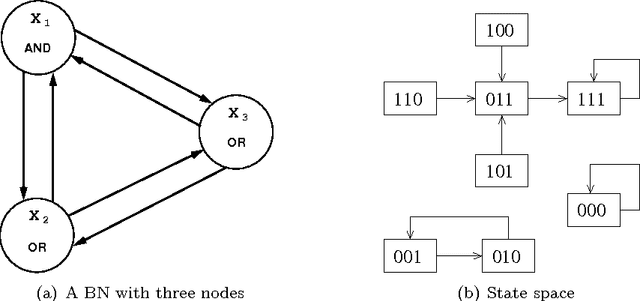
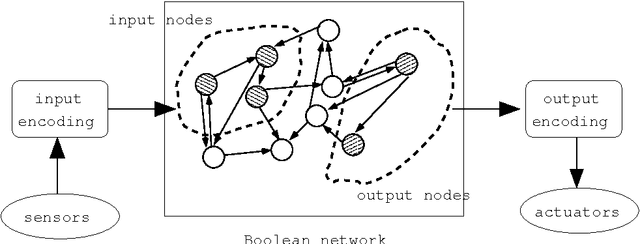
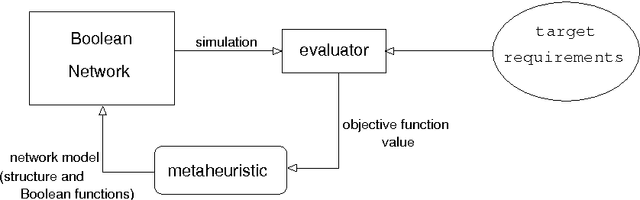
Dynamical systems theory and complexity science provide powerful tools for analysing artificial agents and robots. Furthermore, they have been recently proposed also as a source of design principles and guidelines. Boolean networks are a prominent example of complex dynamical systems and they have been shown to effectively capture important phenomena in gene regulation. From an engineering perspective, these models are very compelling, because they can exhibit rich and complex behaviours, in spite of the compactness of their description. In this paper, we propose the use of Boolean networks for controlling robots' behaviour. The network is designed by means of an automatic procedure based on stochastic local search techniques. We show that this approach makes it possible to design a network which enables the robot to accomplish a task that requires the capability of navigating the space using a light stimulus, as well as the formation and use of an internal memory.