 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Hiatus Between Organism and Machine Evolution: Contrasting Mixed Microbial Communities with Robots
Jun 29, 2022Mixed microbial communities, usually composed of various bacterial and fungal species, are fundamental in a plethora of environments, from soil to human gut and skin. Their evolution is a paradigmatic example of intertwined dynamics, where not just the relations among species plays a role, but also the opportunities -- and possible harms -- that each species presents to the others. These opportunities are in fact \textit{affordances}, which can be seized by heritable variation and selection. In this paper, starting from a systemic viewpoint of mixed microbial communities, we focus on the pivotal role of affordances in evolution and we contrast it to the artificial evolution of programs and robots. We maintain that the two realms are neatly separated, in that natural evolution proceeds by extending the space of its possibilities in a completely open way, while the latter is inherently limited by the algorithmic framework it is defined. This discrepancy characterises also an envisioned setting in which robots evolve in the physical world. We present arguments supporting our claim and we propose an experimental setting for assessing our statements. Rather than just discussing the limitations of the artificial evolution of machines, the aim of this contribution is to emphasize the tremendous potential of the evolution of the biosphere, beautifully represented by the evolution of communities of microbes.
Online adaptation in robots as biological development provides phenotypic plasticity
Jun 03, 2020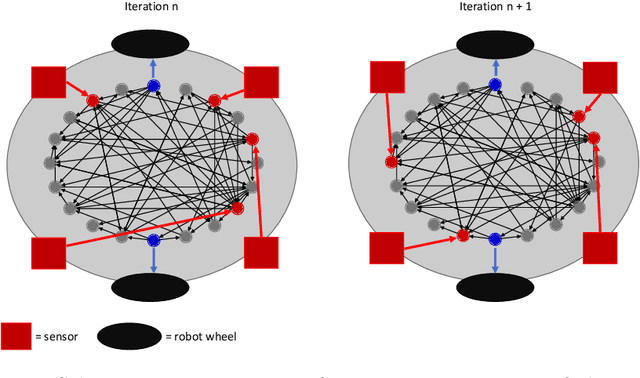
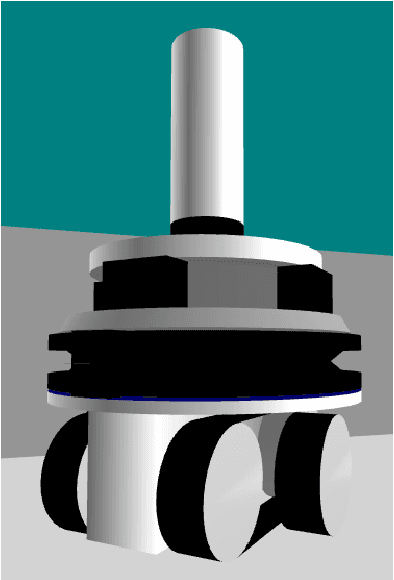
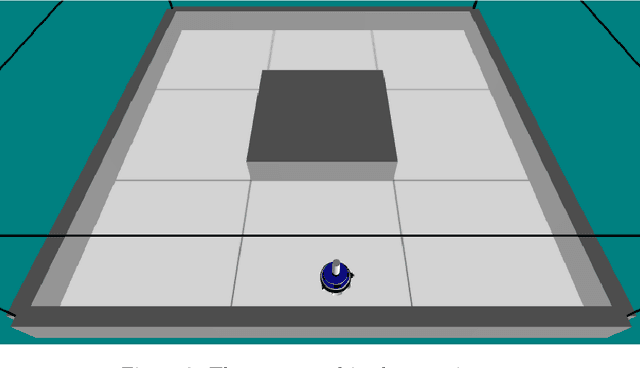
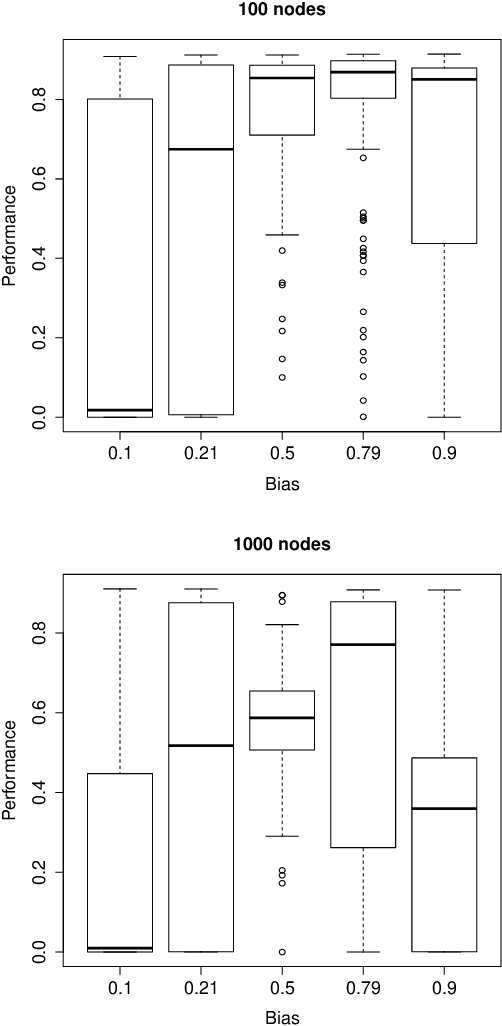
The ability of responding to environmental stimuli with appropriate actions is a property shared by all living organisms, and it is also sought in the design of robotic systems. Phenotypic plasticity provides a way for achieving this property as it characterises those organisms that, from one genotype, can express different phenotypes in response to different environments, without involving genetic modifications. In this work we study phenotypic plasticity in robots that are equipped with online sensor adaptation. We show that Boolean network controlled robots can attain navigation with collision avoidance by adapting the coupling between proximity sensors and their controlling network without changing its structure. In other terms, these robots, while being characterised by one genotype (i.e. the network) can express a phenotype among many that is suited for the specific environment. We also show that the dynamical regime that makes it possible to attain the best overall performance is the critical one, bringing further evidence to the hypothesis that natural and artificial systems capable of optimally balancing robustness and adaptivity are critical.
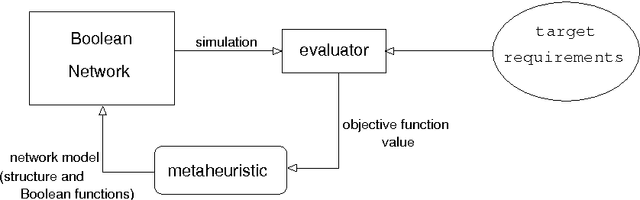
Boolean Networks Design by Genetic Algorithms
Jan 31, 2011
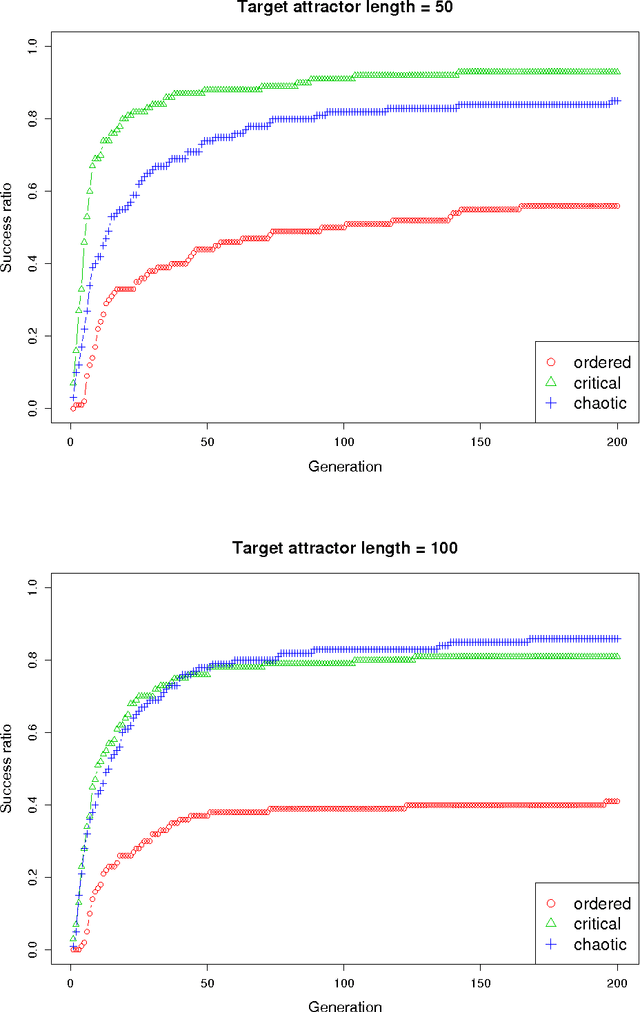
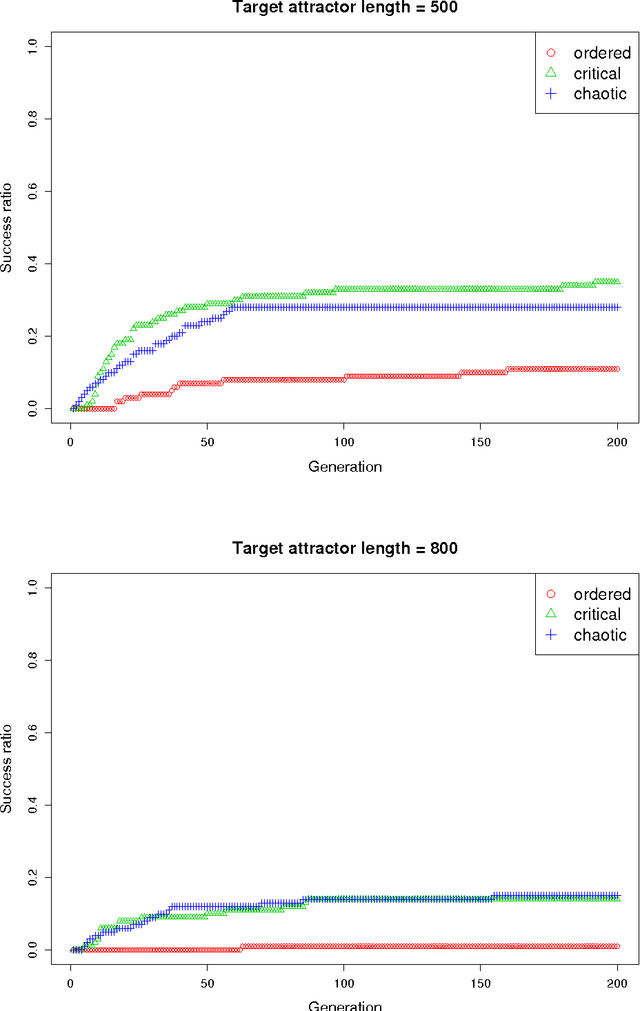

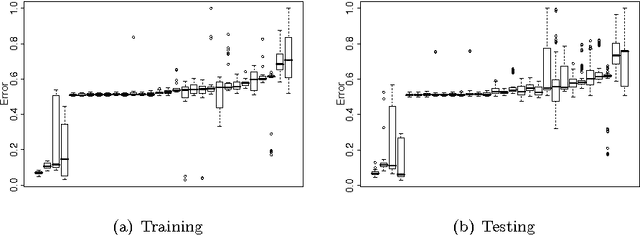
We present and discuss the results of an experimental analysis in the design of Boolean networks by means of genetic algorithms. A population of networks is evolved with the aim of finding a network such that the attractor it reaches is of required length $l$. In general, any target can be defined, provided that it is possible to model the task as an optimisation problem over the space of networks. We experiment with different initial conditions for the networks, namely in ordered, chaotic and critical regions, and also with different target length values. Results show that all kinds of initial networks can attain the desired goal, but with different success ratios: initial populations composed of critical or chaotic networks are more likely to reach the target. Moreover, the evolution starting from critical networks achieves the best overall performance. This study is the first step toward the use of search algorithms as tools for automatically design Boolean networks with required properties.
* 13 pages, 7 figures, 2 tables
Solving the Satisfiability Problem Through Boolean Networks
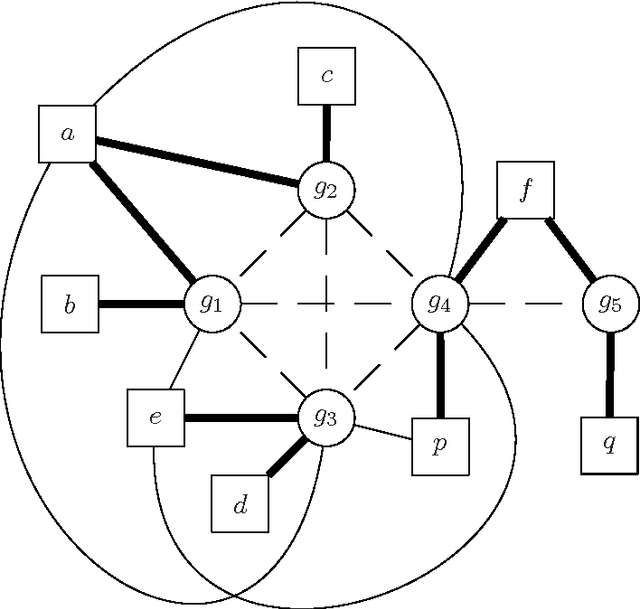
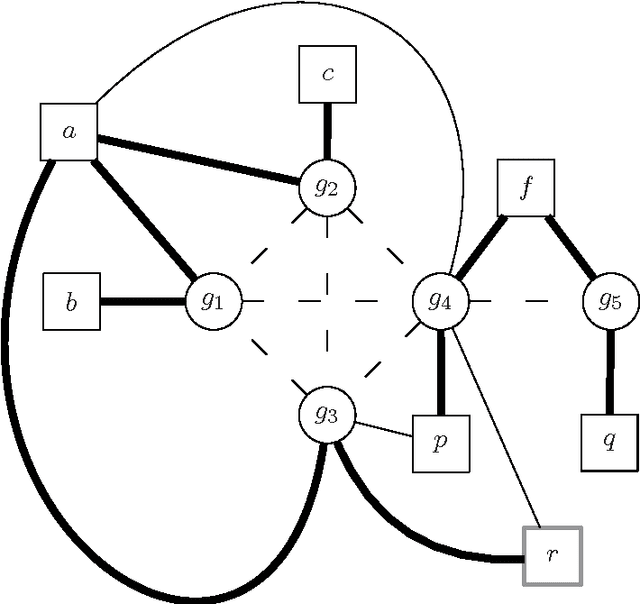
Jan 31, 2011In this paper we present a new approach to solve the satisfiability problem (SAT), based on boolean networks (BN). We define a mapping between a SAT instance and a BN, and we solve SAT problem by simulating the BN dynamics. We prove that BN fixed points correspond to the SAT solutions. The mapping presented allows to develop a new class of algorithms to solve SAT. Moreover, this new approach suggests new ways to combine symbolic and connectionist computation and provides a general framework for local search algorithms.
* 12 pages, 6 figures, 2 tables
Boolean network robotics: a proof of concept
Jan 31, 2011
Dynamical systems theory and complexity science provide powerful tools for analysing artificial agents and robots. Furthermore, they have been recently proposed also as a source of design principles and guidelines. Boolean networks are a prominent example of complex dynamical systems and they have been shown to effectively capture important phenomena in gene regulation. From an engineering perspective, these models are very compelling, because they can exhibit rich and complex behaviours, in spite of the compactness of their description. In this paper, we propose the use of Boolean networks for controlling robots' behaviour. The network is designed by means of an automatic procedure based on stochastic local search techniques. We show that this approach makes it possible to design a network which enables the robot to accomplish a task that requires the capability of navigating the space using a light stimulus, as well as the formation and use of an internal memory.
Analysis of attractor distances in Random Boolean Networks
Nov 21, 2010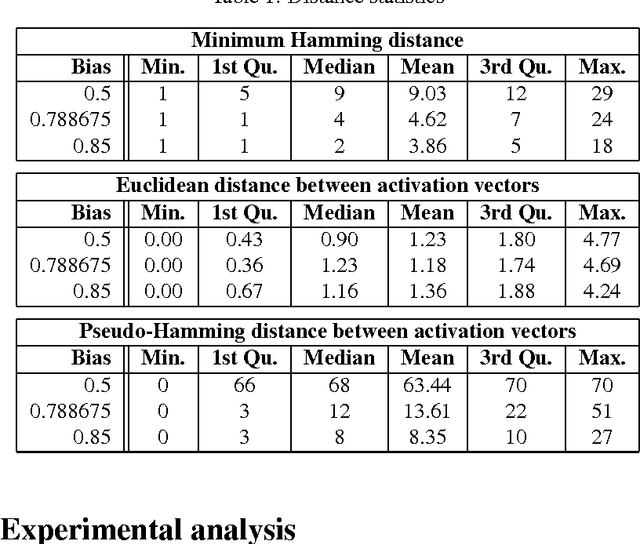
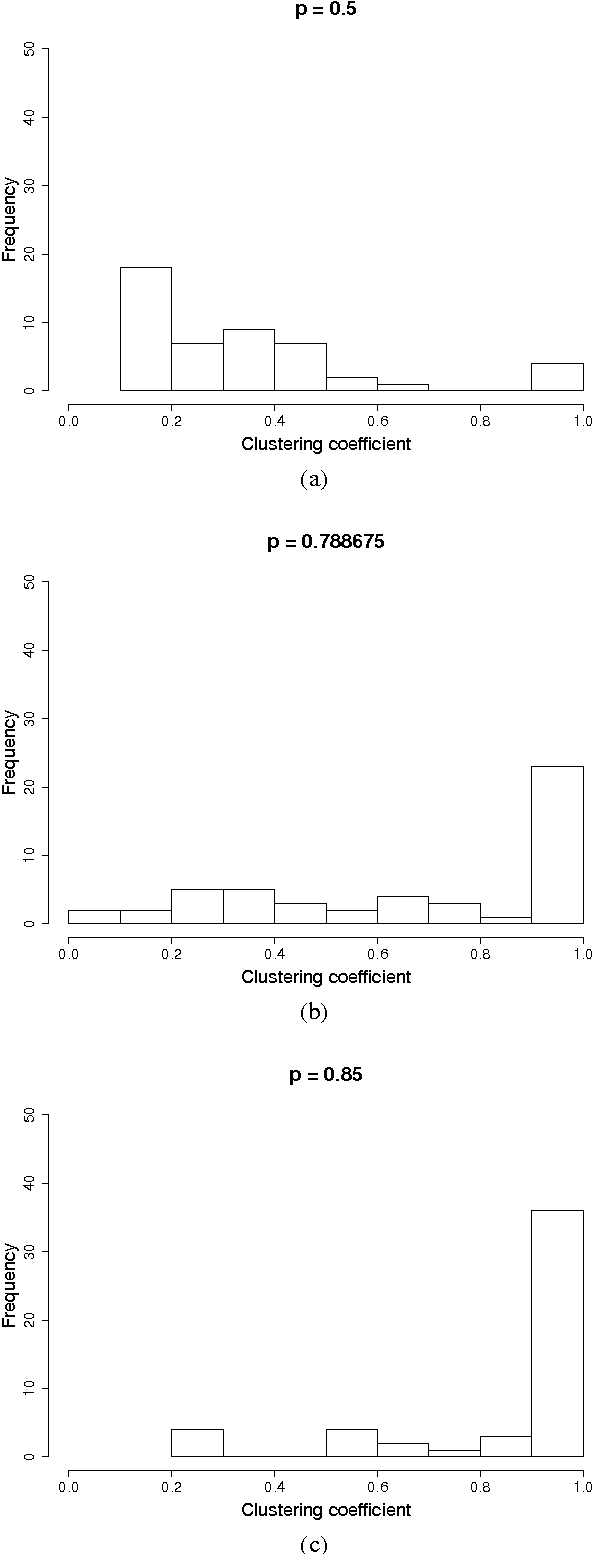
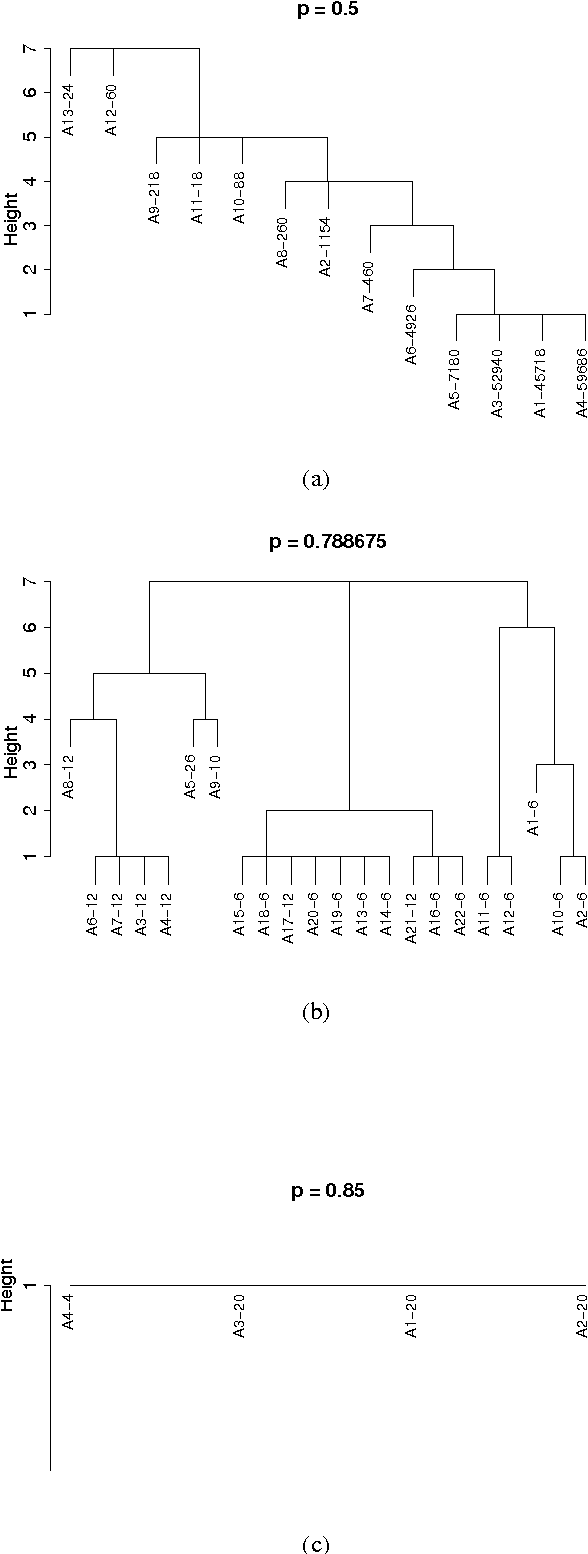
We study the properties of the distance between attractors in Random Boolean Networks, a prominent model of genetic regulatory networks. We define three distance measures, upon which attractor distance matrices are constructed and their main statistic parameters are computed. The experimental analysis shows that ordered networks have a very clustered set of attractors, while chaotic networks' attractors are scattered; critical networks show, instead, a pattern with characteristics of both ordered and chaotic networks.
A preliminary analysis on metaheuristics methods applied to the Haplotype Inference Problem
Aug 03, 2007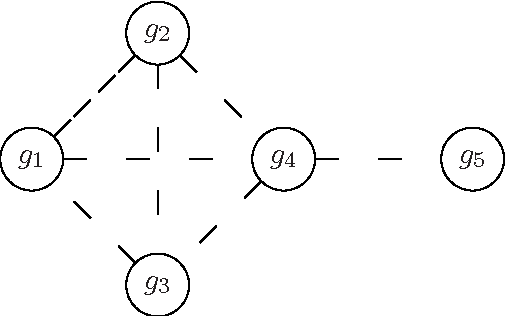
Haplotype Inference is a challenging problem in bioinformatics that consists in inferring the basic genetic constitution of diploid organisms on the basis of their genotype. This information allows researchers to perform association studies for the genetic variants involved in diseases and the individual responses to therapeutic agents. A notable approach to the problem is to encode it as a combinatorial problem (under certain hypotheses, such as the pure parsimony criterion) and to solve it using off-the-shelf combinatorial optimization techniques. The main methods applied to Haplotype Inference are either simple greedy heuristic or exact methods (Integer Linear Programming, Semidefinite Programming, SAT encoding) that, at present, are adequate only for moderate size instances. We believe that metaheuristic and hybrid approaches could provide a better scalability. Moreover, metaheuristics can be very easily combined with problem specific heuristics and they can also be integrated with tree-based search techniques, thus providing a promising framework for hybrid systems in which a good trade-off between effectiveness and efficiency can be reached. In this paper we illustrate a feasibility study of the approach and discuss some relevant design issues, such as modeling and design of approximate solvers that combine constructive heuristics, local search-based improvement strategies and learning mechanisms. Besides the relevance of the Haplotype Inference problem itself, this preliminary analysis is also an interesting case study because the formulation of the problem poses some challenges in modeling and hybrid metaheuristic solver design that can be generalized to other problems.