 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Hiatus Between Organism and Machine Evolution: Contrasting Mixed Microbial Communities with Robots
Jun 29, 2022Mixed microbial communities, usually composed of various bacterial and fungal species, are fundamental in a plethora of environments, from soil to human gut and skin. Their evolution is a paradigmatic example of intertwined dynamics, where not just the relations among species plays a role, but also the opportunities -- and possible harms -- that each species presents to the others. These opportunities are in fact \textit{affordances}, which can be seized by heritable variation and selection. In this paper, starting from a systemic viewpoint of mixed microbial communities, we focus on the pivotal role of affordances in evolution and we contrast it to the artificial evolution of programs and robots. We maintain that the two realms are neatly separated, in that natural evolution proceeds by extending the space of its possibilities in a completely open way, while the latter is inherently limited by the algorithmic framework it is defined. This discrepancy characterises also an envisioned setting in which robots evolve in the physical world. We present arguments supporting our claim and we propose an experimental setting for assessing our statements. Rather than just discussing the limitations of the artificial evolution of machines, the aim of this contribution is to emphasize the tremendous potential of the evolution of the biosphere, beautifully represented by the evolution of communities of microbes.
Online adaptation in robots as biological development provides phenotypic plasticity
Jun 03, 2020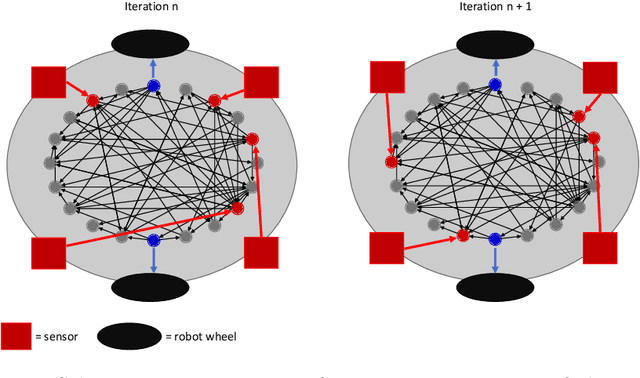
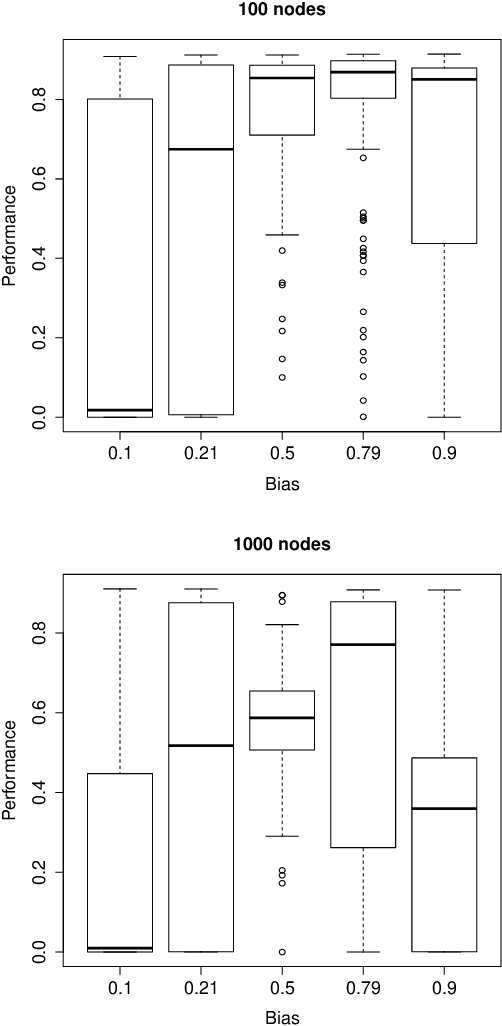
The ability of responding to environmental stimuli with appropriate actions is a property shared by all living organisms, and it is also sought in the design of robotic systems. Phenotypic plasticity provides a way for achieving this property as it characterises those organisms that, from one genotype, can express different phenotypes in response to different environments, without involving genetic modifications. In this work we study phenotypic plasticity in robots that are equipped with online sensor adaptation. We show that Boolean network controlled robots can attain navigation with collision avoidance by adapting the coupling between proximity sensors and their controlling network without changing its structure. In other terms, these robots, while being characterised by one genotype (i.e. the network) can express a phenotype among many that is suited for the specific environment. We also show that the dynamical regime that makes it possible to attain the best overall performance is the critical one, bringing further evidence to the hypothesis that natural and artificial systems capable of optimally balancing robustness and adaptivity are critical.