 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline adaptation in robots as biological development provides phenotypic plasticity
Paper and Code
Jun 03, 2020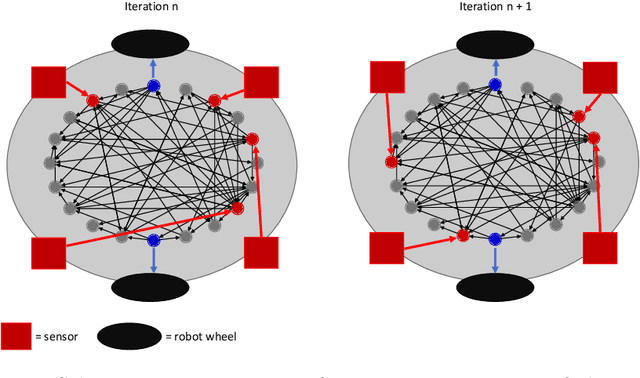
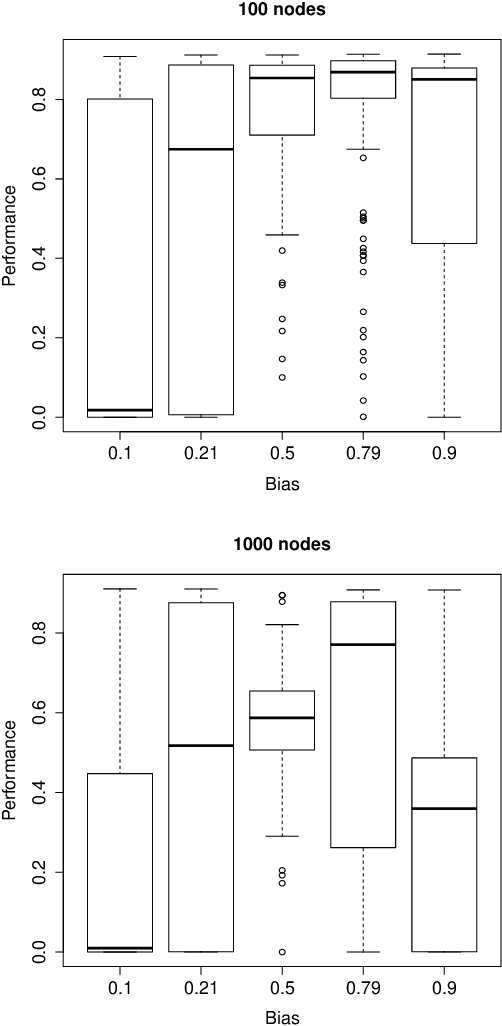
The ability of responding to environmental stimuli with appropriate actions is a property shared by all living organisms, and it is also sought in the design of robotic systems. Phenotypic plasticity provides a way for achieving this property as it characterises those organisms that, from one genotype, can express different phenotypes in response to different environments, without involving genetic modifications. In this work we study phenotypic plasticity in robots that are equipped with online sensor adaptation. We show that Boolean network controlled robots can attain navigation with collision avoidance by adapting the coupling between proximity sensors and their controlling network without changing its structure. In other terms, these robots, while being characterised by one genotype (i.e. the network) can express a phenotype among many that is suited for the specific environment. We also show that the dynamical regime that makes it possible to attain the best overall performance is the critical one, bringing further evidence to the hypothesis that natural and artificial systems capable of optimally balancing robustness and adaptivity are critical.