 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage-Based Swarm Perception: Decentralized Person Re-Identification via Natural Language Descriptions
Jan 18, 2026We introduce a method for decentralized person re-identification in robot swarms that leverages natural language as the primary representational modality. Unlike traditional approaches that rely on opaque visual embeddings -- high-dimensional feature vectors extracted from images -- the proposed method uses human-readable language to represent observations. Each robot locally detects and describes individuals using a vision-language model (VLM), producing textual descriptions of appearance instead of feature vectors. These descriptions are compared and clustered across the swarm without centralized coordination, allowing robots to collaboratively group observations of the same individual. Each cluster is distilled into a representative description by a language model, providing an interpretable, concise summary of the swarm's collective perception. This approach enables natural-language querying, enhances transparency, and supports explainable swarm behavior. Preliminary experiments demonstrate competitive performance in identity consistency and interpretability compared to embedding-based methods, despite current limitations in text similarity and computational load. Ongoing work explores refined similarity metrics, semantic navigation, and the extension of language-based perception to environmental elements. This work prioritizes decentralized perception and communication, while active navigation remains an open direction for future study.
Collective perception for tracking people with a robot swarm
Oct 09, 2024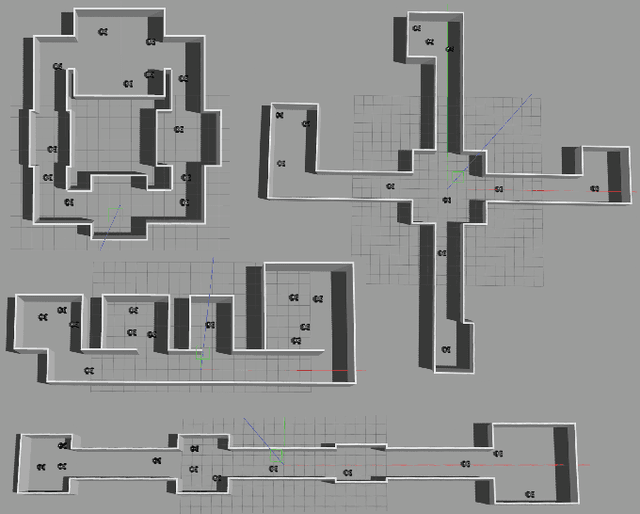
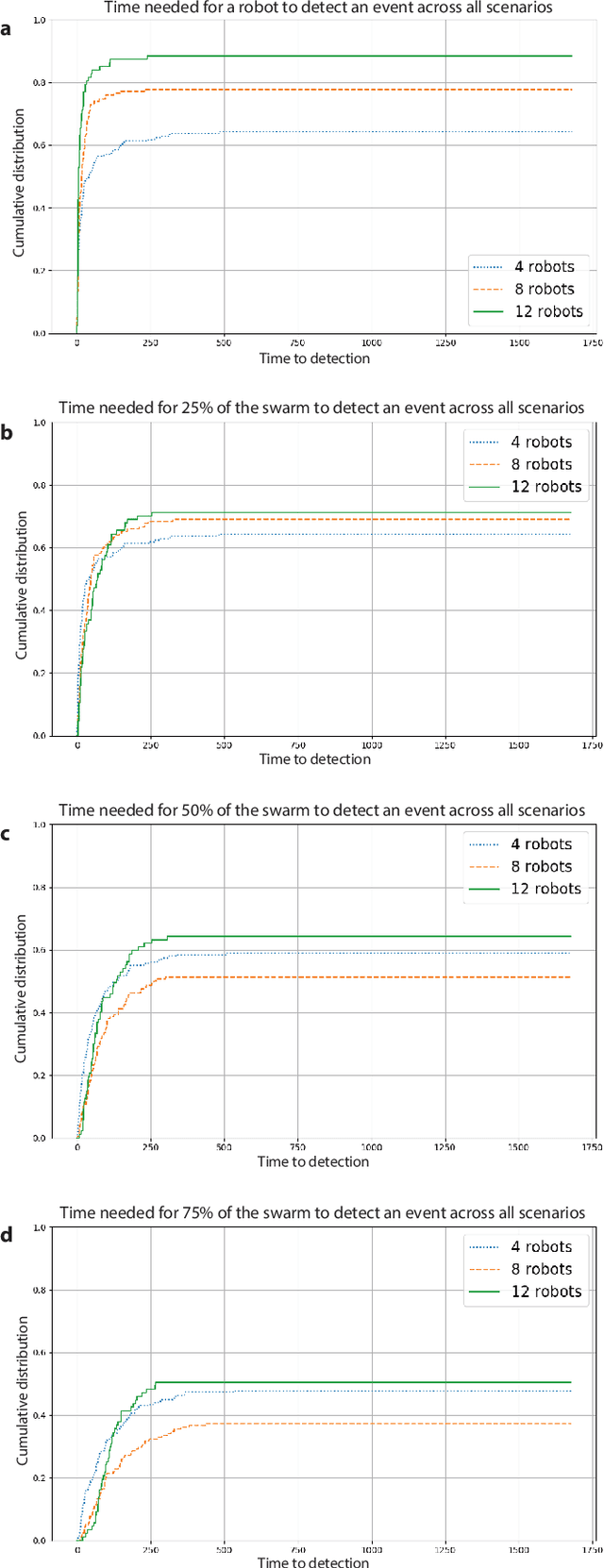
Swarm perception refers to the ability of a robot swarm to utilize the perception capabilities of each individual robot, forming a collective understanding of the environment. Their distributed nature enables robot swarms to continuously monitor dynamic environments by maintaining a constant presence throughout the space.In this study, we present a preliminary experiment on the collective tracking of people using a robot swarm. The experiment was conducted in simulation across four different office environments, with swarms of varying sizes. The robots were provided with images sampled from a dataset of real-world office environment pictures.We measured the time distribution required for a robot to detect a person changing location and to propagate this information to increasing fractions of the swarm. The results indicate that robot swarms show significant promise in monitoring dynamic environments.
Leveraging swarm capabilities to assist other systems
May 07, 2024Most studies in swarm robotics treat the swarm as an isolated system of interest. We argue that the prevailing view of swarms as self-sufficient, independent systems limits the scope of potential applications for swarm robotics. A robot swarm could act as a support in an heterogeneous system comprising other robots and/or human operators, in particular by quickly providing access to a large amount of data acquired in large unknown environments. Tasks such as target identification & tracking, scouting, or monitoring/surveillance could benefit from this approach.
Automatic off-line design of robot swarms: exploring the transferability of control software and design methods across different platforms
May 25, 2023



Automatic off-line design is an attractive approach to implementing robot swarms. In this approach, a designer specifies a mission for the swarm, and an optimization process generates suitable control software for the individual robots through computer-based simulations. Most relevant literature has focused on effectively transferring control software from simulation to physical robots. For the first time, we investigate (i) whether control software generated via automatic design is transferable across robot platforms and (ii) whether the design methods that generate such control software are themselves transferable. We experiment with two ground mobile platforms with equivalent capabilities. Our measure of transferability is based on the performance drop observed when control software and/or design methods are ported from one platform to another. Results indicate that while the control software generated via automatic design is transferable in some cases, better performance can be achieved when a transferable method is directly applied to the new platform.