 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective perception for tracking people with a robot swarm
Oct 09, 2024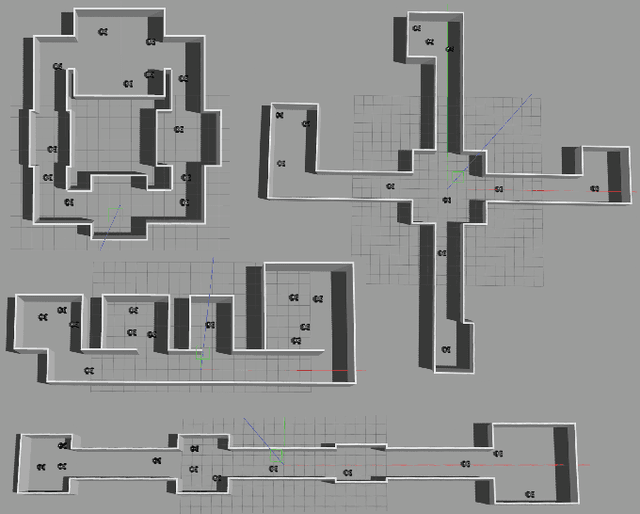
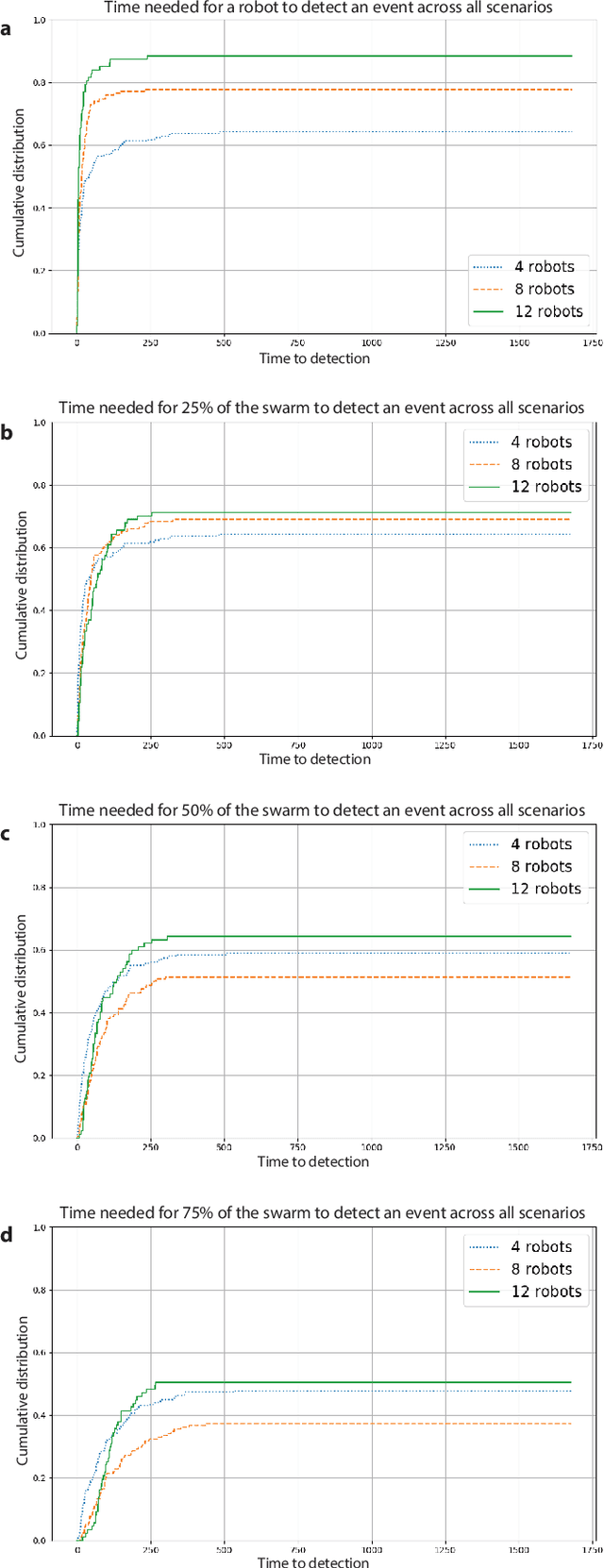
Swarm perception refers to the ability of a robot swarm to utilize the perception capabilities of each individual robot, forming a collective understanding of the environment. Their distributed nature enables robot swarms to continuously monitor dynamic environments by maintaining a constant presence throughout the space.In this study, we present a preliminary experiment on the collective tracking of people using a robot swarm. The experiment was conducted in simulation across four different office environments, with swarms of varying sizes. The robots were provided with images sampled from a dataset of real-world office environment pictures.We measured the time distribution required for a robot to detect a person changing location and to propagate this information to increasing fractions of the swarm. The results indicate that robot swarms show significant promise in monitoring dynamic environments.
Leveraging swarm capabilities to assist other systems
May 07, 2024Most studies in swarm robotics treat the swarm as an isolated system of interest. We argue that the prevailing view of swarms as self-sufficient, independent systems limits the scope of potential applications for swarm robotics. A robot swarm could act as a support in an heterogeneous system comprising other robots and/or human operators, in particular by quickly providing access to a large amount of data acquired in large unknown environments. Tasks such as target identification & tracking, scouting, or monitoring/surveillance could benefit from this approach.